 As mobile mapping systems become more commonplace the debate between accuracy and cost rages, with suppliers competing in terms of system performance as well as fitness for purpose. Here are some of the pitfalls and misperceptions associated with the selection and application of a mobile mapping system and a description of the differences between survey- and mapping-grade systems.
As mobile mapping systems become more commonplace the debate between accuracy and cost rages, with suppliers competing in terms of system performance as well as fitness for purpose. Here are some of the pitfalls and misperceptions associated with the selection and application of a mobile mapping system and a description of the differences between survey- and mapping-grade systems.
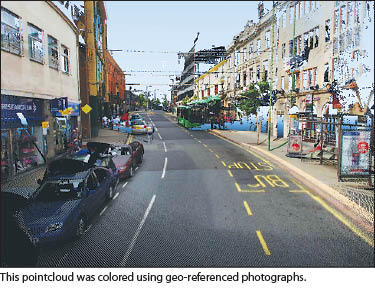
Mobile mapping is the process of collecting geospatial data from a moving platform. Until 20 years ago, in commercial terms at least, this would have been confined to photogrammetric data capture—usually georeferenced photography—from an airplane. Over the last two decades, however, the concept and meaning of mobile mapping has dramatically changed.
The term “mobile mapping systems” is now almost exclusively applied to data collection from a moving, ground-based vehicle. An online search reveals a plethora of systems from suppliers all around the world, including obvious names from the surveying/mapping community such as 3D Laser Mapping, Trimble, and Optech and less-familiar names such as Mitsubishi and Microsoft.
The Basics
What makes a mobile mapping system? Obviously, the system must, by definition, be capable of movement. Host vehicles include station wagons, SUVs, vans, and even recreational vehicles. However, host vehicles can and do include off-road vehicles, boats, and even unmanned aerial vehicles.
The second component is the data-collection element of the system. The term “geospatial data” refers to any data that has a geographic component, i.e. it can be referred to a specific geographical location. The evolution of satellite positioning systems (GPS/GNSS) has probably been the most instrumental in the wider-scale development of mobile mapping systems. However, as most of us are aware—from our in-car satellite navigation systems or even our mobile phones—satellites are not infallible, especially in built-up environments, densely wooded areas, or underground road networks. 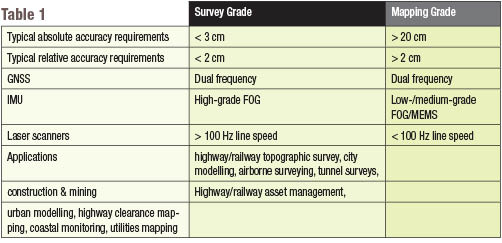 To supplement or even replace lost satellite signals, mobile mapping systems use inertial measurement units (IMU)s. An IMU supplements the positional information provided by the GPS signal, providing information on the vehicle’s velocity, orientation, and gravitational forces. A combination of accelerometers and gyroscopes can also be supplemented with an odometer to form the vehicle’s inertial navigation system (INS). Integrated mobile positioning systems are commercially available and purpose-built for mobile mapping (see the sidebar in “Tracking Signs to Success” in the March 2013 issue of PSM).
To supplement or even replace lost satellite signals, mobile mapping systems use inertial measurement units (IMU)s. An IMU supplements the positional information provided by the GPS signal, providing information on the vehicle’s velocity, orientation, and gravitational forces. A combination of accelerometers and gyroscopes can also be supplemented with an odometer to form the vehicle’s inertial navigation system (INS). Integrated mobile positioning systems are commercially available and purpose-built for mobile mapping (see the sidebar in “Tracking Signs to Success” in the March 2013 issue of PSM).
Finally, we get to the data. We are in motion and we know where we are, so what geospatial data are we collecting? Most mobile mapping systems offer a combination of sensors. Digital cameras (either singularly or in an array) and video cameras are supplemented with laser ranging and scanning devices. These combinations allow for the efficient update of road maps and, in more sophisticated set-ups, the capture of detailed road-condition and asset-management information.
Cost
As is often the case, the choice between a survey-grade and mapping-grade system may boil down to cost. Survey-grade systems offer higher accuracies and therefore demand higher costs. As the difference between the grades is based on accuracy, it must be surmised that the prime differential between the types of systems are essentially differences in the systems’ INS (Table 1).
Error and Improving Accuracy
 Obvious causes of error are no GNSS observations or poor GNSS observations. However, accuracy can be maintained over a period of time by IMU calculations alone. This period can range from less than a minute for a mapping-grade system to around five minutes for a survey-grade one.
Obvious causes of error are no GNSS observations or poor GNSS observations. However, accuracy can be maintained over a period of time by IMU calculations alone. This period can range from less than a minute for a mapping-grade system to around five minutes for a survey-grade one.
However, additional errors can be introduced through poor system calibration (the precise angle between the laser scanner and IMU) and laser range noise (scanner error often referred to as the cleanliness of the data). These can be in the region of 1-2 cm and 0.5-2 cm, respectively.
While improvements in accuracy can be achieved through investment in a higher grade INS, this is obviously expensive and other alternatives are available. A technique called direct inertial aiding (DIA) is where the IMU assists the GPS receiver in areas of poor signal, helping it to regain a lock up to five seconds faster.
Simpler and potentially more cost-effective fixes include mission planning. Careful route planning can be used to avoid known areas of poor GNSS or can be used to allow frequent escapes to areas of good GNSS. Use of satellite prediction software to determine the best time of day may also improve accuracies without investment in expensive equipment upgrades. 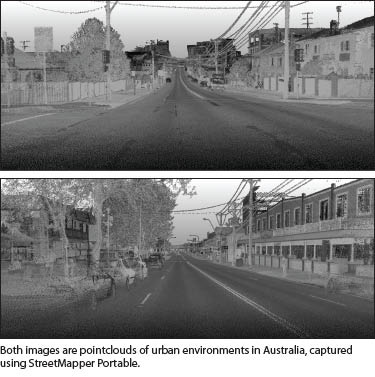 Control points are another way of improving performance and can be used in two ways. They can be used to simply “shift” the data to the correct position, or they can be used as an additional feed of information correcting the INS solution, improving both the position and heading measurements.
Control points are another way of improving performance and can be used in two ways. They can be used to simply “shift” the data to the correct position, or they can be used as an additional feed of information correcting the INS solution, improving both the position and heading measurements.
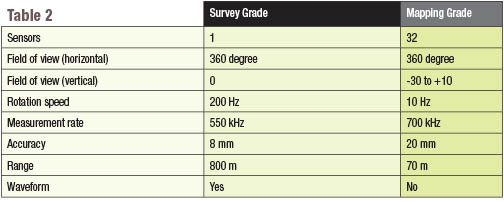
The accuracy of the data collection component will also affect the suitability of the mobile mapping system for specific applications. Known as noise, this type of error can present itself as fuzziness in the data, and high-noise scanners (> 20 mm) may not be suitable for high-end applications such as topographic surveying and safety monitoring (Table 2).
Simple fixes like careful mission planning and the use of control points should improve the accuracy of any mobile mapping system project. However, higher specification equipment in the form of IMU and laser scanner can project a system from the mapping-grade camp into the survey grade arena, but at a cost. While mapping-grade systems may be too inaccurate for some applications, survey-grade systems may be too expensive for others. Therefore, each application should be carefully considered within the project’s specified deliverables, end-user requirements, and of course budget.
One last consideration is the selection of supplier. Proven system performance (at whatever level you have chosen) is essential, as is good service and support. You are making an investment, and you need to be confident your chosen supplier will help you to get a return on both your monetary and time outlays.