Tag Archives: where theory meets practice
What Is a Least Squares Adjustment Anyway?
Up to now I have talked about a least squares adjustment as if everyone knows what it involves. In this article, I discuss what a least squares adjustment is and what makes it so valuable in adjusting observational data. Note: Please click on the images below to see them or read our full issue to...
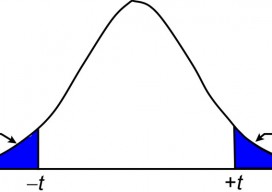
Sampling Statistics: The F Distribution
The F Distribution Please note that the mathematical language used in this version of the article may be formatted incorrectly, due to no fault of the author. Please reference the details of Equations (1) and (2), and check with our print or full digital issue if unsure. In previous articles on sampling statistics, I covered the...
Surveying Statistics
The t Distribution, Part 2 In the previous article (July 2015), I introduce the concept of sampling distributions and the need to use these distributions to analyze small samples of data. In surveying, observing small samples is typical where angles are often observed only two or four times, and repeated distance observations simply means pushing...
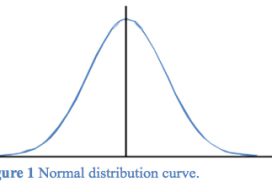
The Normal Distribution, Part 1
Errors in observations can be classified as systematic or random. Systematic errors are errors that follow physical laws and can be mathematically corrected or removed by following proper field procedures with instruments. For example, the expansion or contraction of a steel tape caused by temperatures that differ from the tape’s standard temperature is a systematic...
Transformation of Observations, Part 4
Single Project Factor Here concludes a four-part series of articles about transformation of observations, spanning from September and December 2014 to March 2015. Part 1 covers how to transform surface observations into a geocentric coordinate system so that they can be compared to GNSS baseline vectors. Part 2 is about how the creation of a...
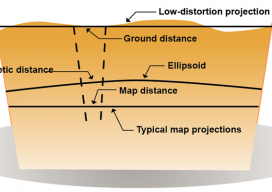
Transformation of Observations, Part 3
Above: Typical and low-distortion map projections. Using a Project Factor In Part 1 of this series of articles (September 2014 issue), I explained how to transform surface observations into a geocentric coordinate system so that it could be compared to GNSS baseline vectors. In Part 2 (December 2014) I explained how the creation of a...