
How interior spaces like mines are being scanned and imaged by a drone that works without a pilot or connectivity.
There is a scene in the Ridley Scott-directed 2012 sci-fi thriller “Prometheus” where a deep space exploration crew lands on a planet and discovers an underground labyrinth. They lob a levitating orb down a tunnel, and it scans all the nooks and crannies of what turns out to be a buried alien spacecraft. Many surveyors I’ve spoken with have speculated that such autonomous mapping tools might eventually become a reality. Well, reality is here—just using a drone.
One of the minds that helped imagine such near-future technology is Dr. Vijay Kumar, co-founder and Chief Science Advisor of Exyn Technologies Inc. He and the team at Exyn have developed an unmanned aerial system (UAS) that has achieved level-4 autonomy—exploratory SLAM-based scanning of complex GPS- and communications-denied spaces without a pilot.
A University Spinoff
Dr. Kumar is the Dean of Penn Engineering at the University of Pennsylvania in Philadelphia, a prominent private research institution. Dr. Kumar and Exyn CEO Nader Elm co-founded the company in 2014. By 2018, Exyn Technologies Inc. had entered the mining market and has grown to become one of the leading global companies providing solutions to more than 40 mining operations worldwide.
Exyn has two key products, a handheld SLAM scanner and an autonomous UAS-based solution. However, they consider their firm to be “more of a software company,” said Raffi Jabrayan, VP for commercial sales and business development at Exyn. “We’re actually hardware agnostic. So our autonomy software could work on any robotic platform.”
They currently integrate their autonomy solution with hardware from DJI, Ascent AeroSystems, and others. They’ve recently announced that they are integrating their autonomy on a U.S. made UAS from Easy Aerial. “We like to say that we are good to go on any existing platform, of course, so long as it can carry our payload,” said Jabrayan. “This allows us to capitalize on the best hardware out there.” The same openness extends to the LiDAR, working with units from Velodyne and others, as well as other components like IMUs.
At the present moment, most of their market is for underground mining, however their outdoor UAS solution will soon be released with more applications within surface mining operations and further opportunities in construction and infrastructure inspection.
Self-Contained
Operating the UAS does not require any sort of infrastructure; no Wi-Fi, no external positioning systems like beacons, total stations, and no GNSS (though that will likely come into play for outdoor operations). “Everything is done on the robot itself; it is entirely self-contained,” said Jabrayan. “And then once it comes back within connectivity, it’s able to dump the data onto the tablet for evaluation and post-processing. So, of course, we can fly completely beyond the visual line of sight; farther than that we can fly beyond any sort of connectivity.”
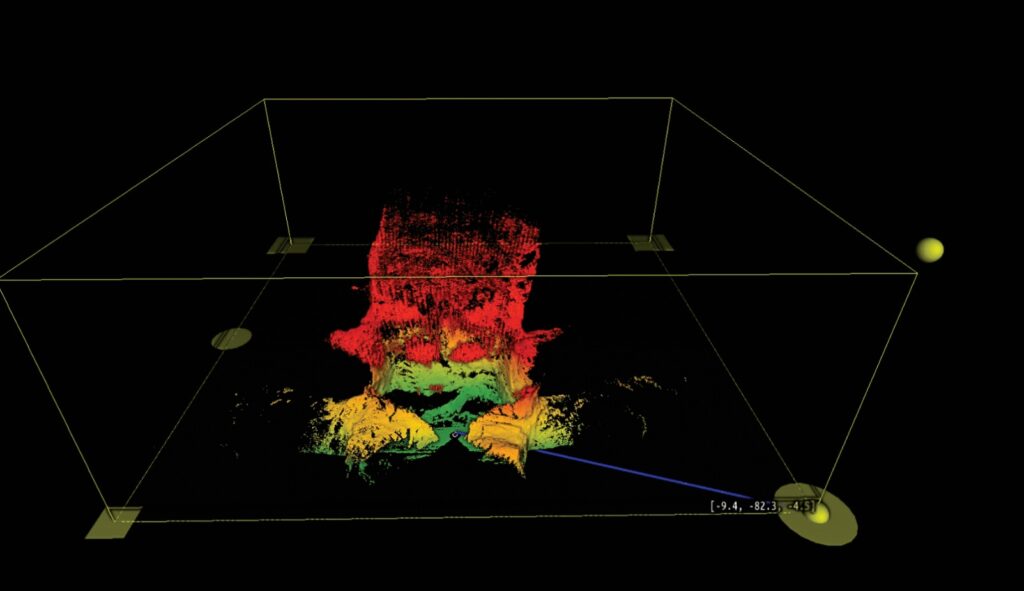
On the operating tablet, you define a volumetric area, then send the UAS on its way. Once it has explored all of the tunnels and cavities within, it returns home. – Source: Exyn
What they have achieved is Level 4 autonomy. Levels 1 to 3 require a pilot, Levels 4 and above do not. Level 0 denotes no autonomy, 1 is pilot assist, 2 is partial autonomy, and 3 is conditional autonomy. Level 3 is how many of the UAS platforms that surveyors use today operate—you set waypoints toward areas of interest and the autonomy takes over. Level 4 is high autonomy. For the Exyn solution, you simply define a volumetric area of interest, and the autonomy creates its own waypoints to explore as much of the area as possible. In some ways, the Exyn solution touches on Level 5: full autonomy, where you only provide an objective.
“What you do is you give it a mission from a tablet, and ‘press play,’” said Jabrayan. “And then there’s nothing further you need to do, you can sort of sit back and let it do its thing—there is no pilot hand-off. And everything is done autonomously. When it goes into a certain area, it will detect a wall, obstacle, or hanging cables and navigate around it.”
On the operating tablet, you define a volumetric area, then send the UAS on its way. Once it has explored the area of interest or hits a battery threshold, it returns home.
There are two different flight modes. A Point-to-Point option where you can tell it to “go there” and “come here.” And the Exploration mode is where you give it a volume or area, and it just goes in and explores it and comes back. The route it takes is completely up to the drone; it may take one route going in and a different route coming out. Think about how your autonomous vacuum cleaner explores all of the rooms and corridors of your home or office until it determines that it has “mapped” an entire floor. “We don’t dictate how it should go,” said Jabrayan. “It will calculate its best route forward. And as it maps, it will keep progressing and then come back home once it’s completely done.”
While the UAS could fly as long as 16 minutes, most mapping missions are done in under 10 minutes. It covers a lot of ground, flying at between 2 and 3 meters per second. While there is a camera, it is for documentation and not remote piloting. “A lot of times when you are flying a mine the customer wants to see over-breaks and under-breaks in the patterns,” said Jabrayan. “We’re able to capture 4k video and download it when it comes back home.”
Jabrayan said that mining survey teams don’t need to be drone experts to fly the ExynAero. “I’d say that more than half of the surveyors who use our product have never flown a drone in their life and are not drone pilots.” This of course would be different for many outdoor applications where FAA Part 107 and other rules, regulations, and waivers would come into play. “What we do is we train them on how to use our product,” said Jabrayan. “In emergency situations we’ve done some of this training remotely over Zoom. But generally, we’ll go out to the site, spend a couple of days with the surveyors underground with the tablets, and teach them what to do.”
Blue Sky and No Sky Applications
Exyn is entering into different sectors and expanding their mining applications, for such areas as room-and-pillar type mines. Other indoor applications could include surveys of buildings, tunnels, warehouses, and plants (much like what scanning “robo-dogs” are beginning to do). This sort of autonomy could be used to map and inspect underground utilities (when there is enough room to fly) like utilidors, water, drainage, and sewer systems.
Many outdoor applications could, of course, leverage GNSS to geo-fence an area of interest (so the drone does not go wandering off autonomously). And this solution could be advantageous in GNSS-denied or limited areas like under heavy tree canopy. Construction, infrastructure inspections, site management, asset management, and public safety applications—folks are going to dream up a lot of uses for such solutions.