Free and Global: The new high accuracy positioning service (HAS) of the Galileo constellation and its advantages for GIS and asset mapping
If you consider field mapping applications, such as for GIS, asset inventory and management, and field operations for utilities, how wonderful would it be to have sub-foot positioning in real time, with no base needed, no network, and no subscription? And globally; anywhere, any time?
A new high accuracy service (HAS) of the European Galileo constellation shows promise for checking all of those boxes, and early testing shows that it could already be ready for adoption by quite a few industries. If you are looking for survey-grade accuracy, perhaps HAS is not for you. However, HAS could significantly disrupt mapping-grade markets and bring a boost in productivity for many applications. We hear the term “game changer” all too often, but this could be one.
Please keep in mind, as you read below about some early testing, that HAS is in an initial, call it “Beta” phase. In subsequent phases, that could come as early as 2024, performance should greatly improve, particularly in convergence times.

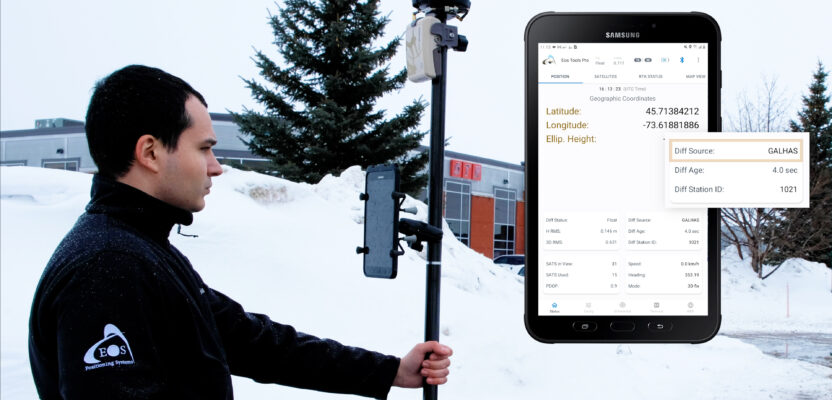
HAS, the free and global sub-foot positioning service of the Galileo constellation, is already being tested by GNSS manufacturers. Shown here, an Eos Arrow Gold and field mapping application. Source: Eos
How HAS works is that essential clock, orbit, and bias model “messages” for precise point positioning (PPP) are delivered via the same GNSS satellites that provide the observation data used in determining position. While this is not a new concept—there are three such services delivered by the Japanese QZSS constellation (observable over Japan, south Asia, and Australasia)—there are aspects of HAS that position it as a first-of-its-kind among global positioning services.
There are regional satellite-based-augmentation-systems (SBAS) such as the Wide Area Augmentation System (WAAS in North America but known by different names in other countries). These are not strictly PPP and are mostly designed for coarse positioning and navigation, plus they have limited coverage. Some users doing GIS and asset mapping utilize SBAS (where available), however, the results are rarely anything akin to that which HAS will deliver.
Precise Point Positioning
PPP has been around, in various forms, for decades. It is generally accepted that the concept of Precise Point Positioning (PPP) was introduced in a 1995 by Natural Resources (NRcan) Canada. The idea was to utilize very precise clock and orbit products and observations of a rover to resolve the distance from multiple satellites to the rover. This differs from various differential positioning approaches, such as DGPS, real-time kinematics (RTK), and network RTK (NRTK/RTN) in that you do not receive “correctors” from local base stations or networks. This was the incentive for Canada to develop its PPP service as there are vast regions of Canada without terrestrial infrastructure, such as continuously operating reference stations (CORS), or much passive geodetic control.
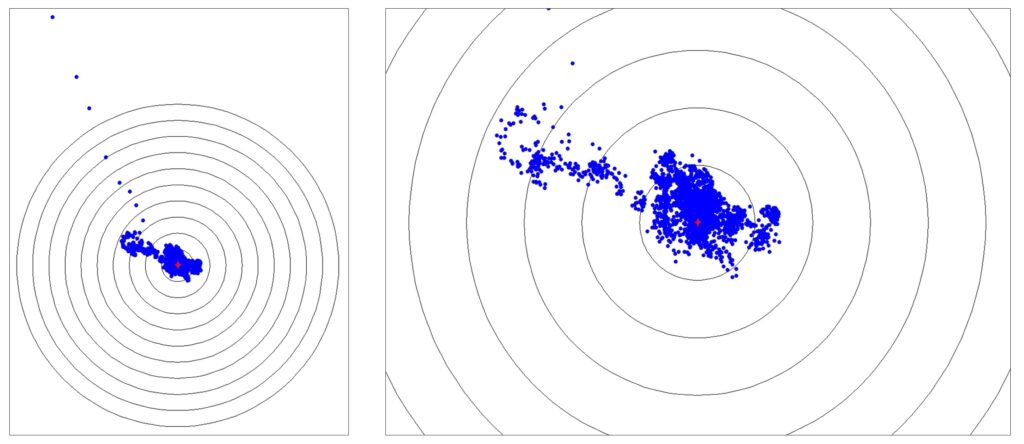
A 17-hour test session performed with an Eos Arrow Gold+. Reference circles are 10 cm. The outliers represent the convergence period, followed by the tight cluster of solved positions. Source: Eos
Indeed, PPP evolved in the form of numerous public and commercial services, to become a powerful force in global positioning markets. For real-time PPP, messages can be delivered via the Internet, or as many commercial services have adopted, via arrays of L-Band communication satellites, typically in geostationary orbits above the equator. Commercial services have added more messages to those of standard PPP to reduce convergence time and improve precision. Such subscription-based PPP services can, under optimal conditions, deliver near-survey-grade positioning in the realm of two centimeters horizontal and five centimeters vertical.
And while HAS will not deliver such precisions, it overcomes some of the handicaps of real-time broadcast PPP to serve numerous applications where 10 to 20 centimeters horizontal, and 20 to 40 centimeters vertical will suffice.
Convergence
A key difference between PPP and differential methods like RTK, is that standard PPP needs a relatively long period of time to converge into a solution. In early PPP, this would take up to an hour or more. However, once it arrived at that converged solution, the user could go about their fieldwork unless the source of PPP messages was lost for several minutes. There are PPP implementations that can start on a known point (i.e., with published ITRF coordinates) to speed up convergence, but in most situations, the process simply needed time to “cook.”
The commercial services have reduced convergence times by employing semi-dense networks of bases to provide ionospheric models to the PPP messages they broadcast, reducing convergence times to under a minute in many cases. HAS by contrast, is in an early phase, with long convergence times as it is initially only providing only clock and orbit information. Phase biases and ionospheric correction messages are not yet part of the broadcast messages. They will be added in subsequent phases, greatly reducing convergence times.
“According to the European Union Agency for the Space Program (EUSPA), HAS was planned to roll out in three phases,” said Jean-Yves Lauture, CTO for Eos Positioning Systems. “Phase 0 was the development and testing phase. Phase 1, the initial public service, happened in January 2023. Think of phase 1 as the first beta, made available to the public, to test and develop, as we have been doing at Eos. Phase 2 will be the operational phase. When phase 2 begins, hopefully in 2024 or 2025, there will be two service levels. Service Level 1, which is worldwide, should have a conversion time of less than five minutes. Service Level 2, for Europe, should be less than 100 seconds.”
Convergence time, if the goals for phase 2 are met, would not be a handicap for field mapping applications, and especially if there are no other positioning segmentation services available. Plus, HAS is free.
Source Satellites
There is another advantage of HAS, and that is because the source of PPP messages is the sky footprint of the entire constellation. A challenge of using real-time PPP services (with the exception of QZSS) is that you need to either get PPP messages via the Internet or keep at least one of the geostationary broadcast satellites in view during most field operations. HAS solves this issue.
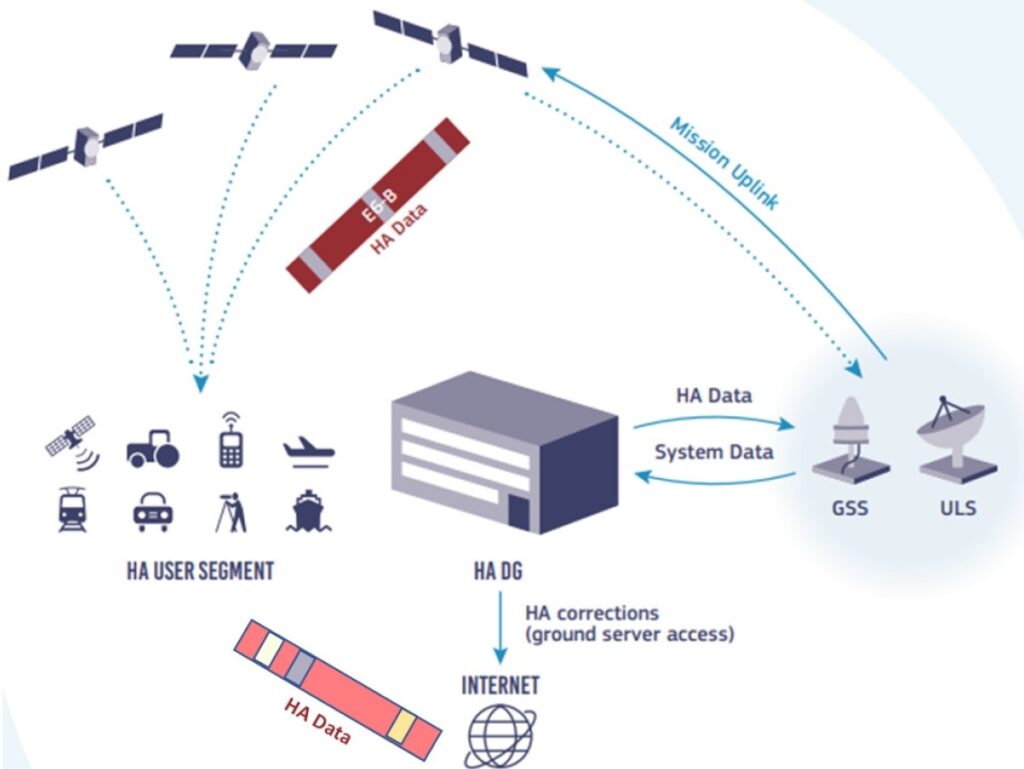
The ground segment of the Galileo constellation develops the clock, orbit, bias, and (eventually) ionospheric model data for the HAS PPP solution, uploads it to the Galileo satellites, and broadcasts this via the E6 signal. Source: EUSPA
Newer model GNSS rovers have seen the E6 signal of Galileo listed. HAS is broadcast via E6 (E6-B data component). This is possible because the big broadcast is fragmented into small sets of messages of around 50 bytes, and each satellite broadcasts various sets of the messages.
Availability of the signals is a key advantage for HAS. The Galileo constellation has 30 satellites in orbit: 24 plus six spares in three orbital planes. Chances are, at least few of those will be in view at any time just about anywhere on the globe to get at least a good set of messages. It should be noted that HAS provides this data for solutions using combinations of the Galileo E1, E5a, E5b and E6 signals, and GPS L1 C/A, L2C and (soon) L5 signals. It is unclear if the service will be expanded to encompass other constellations; the general consensus is that this would be unlikely.
While HAS can be accessed via the Internet, that might not be the way most utilize it. After all, if you have Internet access, in the form of cellular connectivity, some might prefer to use RTK or NRTK connections for faster convergence and higher precision.
“I see the E6 delivery of it to be far more interesting than the IP delivery,” said Larry Fox, VP for marketing and business development for Bad Elf, and another early tester of HAS. Fox recounted some recent work in the Caribbean, where there was no cell service and no local CORS: “I thought that was a scenario where HAS would be a great fit.”
Early Testing
I connected with several manufacturers that have been testing since the first phase of HAS was made public this year. There is a wealth of documentation provided by EUSPA from which they’ve been able to set up the positioning engines in their GNSS receivers. Unlike the L-Band delivered PPP services, developers do not have to make any hardware changes or add software-defined L-Band radio receivers. In most cases, their receivers already receive E6.
“When it comes out of beta, it’s a very minor change for us in the grand scheme of everything that we’ve been doing firmware wise,” said Fox. “We have the ability to field upgrade GNSS firmware; that’s a pretty straightforward process.”

Bad Elf has been testing HAS with its Flex GNSS receiver/antenna system. Source: Bad Elf
There are hopes for HAS to come out of beta by the end of 2023, though it could take longer as we hear that there are some issues with certain elements like the libraries the EU would like developers to use.
“When it comes out of beta, we might only need a month or so of testing before deployment,” added Fox.
Lauture has been doing some initial testing of HAS for Eos, noting that this is still the beta phase and convervgence times should improve in the next phase.
“In some of the first tests using HAS with the Arrow Gold+, we saw that in about 20 to 25 minutes, we were about 33 centimeters from a true location. It varies, sometimes taking a little bit longer depending on the atmospheric conditions. And then it slowly works its way down to within 10 centimeters. But it is safe to say that within 15 to 25 minutes, you can get down to the 30-centimeter range, and with a bit more time, within the 20 centimeter range.” This is in line with the accuracy goals EUSPA has set forth,
“Our Arrow Gold+ customers are already using this in the field today and getting these results worldwide,” Lauture said. “And when EUSPA releases the missing messages, these early adopters will be able to benefit from the higher accuracy immediately.”
Eric Gakstatter, principal GNSS consultant for the Discovery Management Group and another early tester, shared the following results of some preliminary, repeated testing sessions done at his lab with a fixed antenna with clear sky view and an Eos Arrow Gold+ receiver: Float 10 min after power up – 30cm (10 GPS + 6 Galileo). 23 cm after 14 min, 19cm after 20 min, 14cm after 30 min, and 10 cm after 50 min. Gakstatter said he let it cook overnight and was getting down to about 5cm.
An acquaintance of mine in south Asia has a test receiver set up and allowed me to remote in and run some sessions. Results all fell in line with those reported above.
Implementation
The results look promising, and once out of beta, it might not be too long before HAS becomes a standard feature on many GNSS field rovers. There are certain things that developers have to work out in their own positioning engines and in the way that positions are reconciled to standard reference frameworks. However, this is moot for most developers who had already worked this out in integrating Galileo into their solutions. These and other elements might initially pose a challenge for new players trying to build super-low-cost solutions, though HAS may become easy to integrate for them and DIY developers.
Some developers hinted at the potential of a hybridization of solutions, though they’re not willing to talk openly in this ideas stage. Could HAS work in parallel to, and as an adjunct to existing PPP solutions, or even RTK? What would be the scenarios where a tiered selection of solutions could fill in, or take over if other solutions are interrupted? We should expect, given that HAS is a free global service, that developers will find creative ways to leverage it.
Present positioning resources for GIS and asset mapping come with significant points of pain that HAS can address.
“The fact that HAS is broadcast from the Galileo satellites is the difference between real-time PPP being viable for GIS asset mapping and not,” said Gakstatter.
Some of our customers have tried to utilize existing geosync-based real-time PPP and the results have been frustrating due to lack of corrections because of obstructions from buildings, trees and terrain. Think about a GIS tech assigned to map manhole covers in a municipality using a geoysnc-based real-time PPP service. The tech would pull their hair waiting around for a sub-foot solution because the single geosync satellite would be in and out of view. With HAS, the user will likely always have at least one Galileo satellite in view, providing continuous data for sub-foot positioning.”
There is also the matter of the limited global reach of such existing PPP services.
“Geosync-based real-time PPP services struggle in high latitude environments…because the geosync satellites (located a 0 degrees latitude) are so low on the horizon. HAS opens up a new world of high-accuracy mapping in those regions of the world.”
What HAS could hold for GIS and asset mapping, is that you will be able to get reliable sub-foot positions in real-time, with no infrastructure, and for free. HAS could soon be a standard option for receivers used for many mapping applications, especially the “bring-your-own-device” receivers that act as positioning peripherals for mapping applications (i.e., Esri ArcGIS Field Maps).
HAS may never become a good fit for surveying, construction, autonomy, and other high-precision applications, nor be able to match the precision and fast convergence of the many commercial positioning services. However, for many sub-foot applications, free and global can go a long way.