
Above: Walkaround mobile scanning is being increasingly used as a go-to tool for as-built surveys of residential properties as an input to remodel design. Credit: Precision Property Measurements.
Part 1: Basic types, differences, and advantages.
Walkaround mobile scanning includes “backpack,” “push-cart,” “hand-carry,” and “handheld,” but whatever you call it, it’s gaining real momentum in the market and I believe is worth a serious look.
Evidence for walkaround mobile scanning’s strong growth is pervasive. With systems first appearing during 2012-2013, there are now many vendors for each basic type. Some vendors are on second- or third-generation systems, and many vendors have multiple product offerings. Unit sales are becoming significant compared to tripod-based scanner sales.
On the user side, it’s now commonplace to hear people openly talking about success with these systems. For many users, walkaround mobile scanning systems are now their go-to tools.
What Is It?
Walkaround mobile scanning is the ability to capture surrounding space by continuously walking a laser-scanning device through a space rather than having to operate it statically, i.e. set it up, let it scan, move it to another stationary setup, and so forth.
To be sure, some walkaround mobile scanning systems are also often used in ways that are faster than walking, e.g. scooters, bikes, ATVs, even Segways. The distinction here is that the systems can easily be used in a walkaround mode versus, say, large mobile scanning systems intended to be mounted on vehicles.
Another primary difference is that walkaround mobile scanning systems produce a single “registered” point cloud, so registration process steps in the office (stitching together scans from individual setups) that are common to most static scanning systems are often avoided. In such cases, walkaround mobile systems produce a point cloud-ready for export to “point-cloud-capable” software. Multiple walkaround scans still need to be separately registered.
This two-part article will cover: 1) how walkaround mobile scanning differs from static scanning from practical operational, economic, and results aspects, 2) potential advantages of walkaround mobile scanning versus competing mapping and as-built methods, 3) applications where it’s getting traction and why, and 4) current constraints.
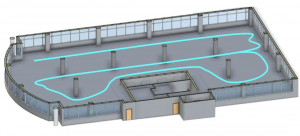
Mobile scanning avoids multiple setups of static tripod scanners. Instead, users plan out an optimum walking path/trajectory for field data capture. Credit: Kaarta.
Big-picture Differences
The biggest single advantage of these systems over static, tripod-based laser scanning is typically field productivity: often these systems are 5-10 times more efficient, timewise, than static scanning for sweet-spot applications.
Another potential advantage is a better ability to fit in small spaces. (I cover advantages in depth later in this article.)
The primary trade-off of walkaround mobile systems is accuracy. There’s a relevant analogy here between static and kinematic GPS: higher GPS accuracy can be achieved in static mode than in kinematic mode.
Absolute geometric accuracy is a tough topic to nail down for walkaround systems. In the big picture, they’re not as accurate as high-end static scanners, but they’re accurate enough for a lot of common applications.
The most popular high-end static scanners can achieve positional accuracies of <1/4” (<6mm) or even 1/8” (3mm). Walkaround mobile systems vendors often cite one accuracy for a single room and another for a full, multi-room building. For a single room, most walkaround systems vendors claim around ”-1” (1-2+ cm) with larger errors for a full building.
Field techniques can have a meaningful impact on final accuracy. Most current versions of walkaround mobile scanners are also limited to about 100m spec range with lower practical range (and many are much shorter range), whereas some static scanners can capture out to several hundred meters or even out to 1km or more.
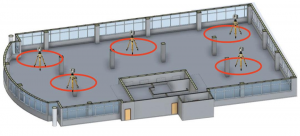
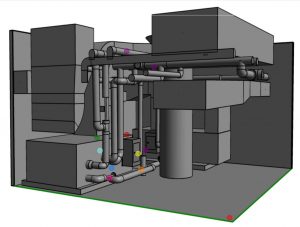
Walkaround scanning has proven to be effective for plant spaces such as this boiler room. Credit: Shive-Hattery.
Basic Types
There’s a virtual continuum of solutions/options for users.
Pushcarts: The scanning system, imaging, and IMU are mounted on a pushcart that also features wheel metering (i.e. accurately measuring distance by the number of wheel rotations). Some include capabilities for incorporating specific marker points into the overall cart trajectory and path “network adjustment” or “registration” solutions. Pushcarts tend to be relatively expensive (>$100k +) compared to hand-carry mobile systems.
General advantages are the convenience of pushing something rather than carrying it, plus potentially more-accurate results thanks to being able to count wheel revolutions and being able to stop/locate over specific markers. Best applications include large, relatively open interior spaces and exterior spaces with flat surfaces. Current vendors in this space include NavVis (M6; see Marc Delgado’s article in this issue) and Trimble (TIMMS).
Backpacks: These systems tend to be the more expensive (most are >$100k) and capable ones, as some derive from high-end, vehicle-mounted or even airborne systems. As such, the higher-end ones have GNSS, high-end IMUs, multiple scanners and calibrated cameras, and some even have thermal cameras.
They also tend to be the heaviest of the carry-around systems (ranging from approx. 20lbs-41lbs/8kg – 18 kg), which is why it’s better to use a backpack than hand-carry them.
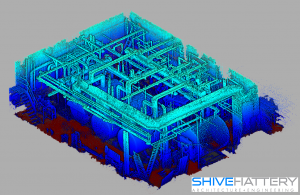
Although it takes more time to capture built-out spaces, walkaround mobile scanning is an even more cost-competitive and attractive option for such spaces. Credit: Kaarta.
There are noticeably fewer of these units in the market than “hand carry” or handheld systems, but they are experiencing sales growth. Vendors in this space include Leica (Pegasus:Backpack), VexCel (Ultrcam Panther), Gexcel (Heron), and Indoor Reality (IR1000T).
Hand carry: Based on my recent homework, this appears to be the hottest segment of the developing walkaround mobile scanning market. These SLAM-based systems typically have a scanner, camera(s), and lower-cost IMU. The secret sauce for each is their own proprietary SLAM algorithms that merge all sensor data to produce a single “registered” point cloud.
The combination of price point (currently roughly $30k-$50k+), lightweight/hand-carry convenience, logistical versatility, and accuracy (approx. 1-5 cm) is finding rapid market acceptance.
Logistical versatility includes the ability of some to also be used on scooters or almost any small vehicle.
Systems with Velodyne puck lidar (>300,000 pts/sec, 100m max spec range) are often used for exterior spaces, while systems with the Hokuyo lidar sensor (43,000 pts/sec, 30m spec range) are used for interior spaces.
These systems have benefited from regularly falling lidar costs, as their lidar units are also being used for the burgeoning autonomous vehicle market.
The first successful commercial supplier in this space was GeoSLAM, which started selling systems in 2012. More-recent, quickly growing entrants include Paracosm and Kaarta.
Handheld: Featuring maximum maneuverability and convenience, these systems have thus far been characterized by even better affordability and short-range (1-10m). Some have surprisingly high-accuracy (several mms) performance at their optimum usage range of 4-8’. Affordability ranges from $1.5k-$15k for the short-range, high-accuracy systems.
The two major vendors in this growing segment have been DotProduct and Mantis. Leica has also announced an integrated handheld (BLK2GO, up to 30m range and 700,000 pts/sec), but it’s not yet shipping. With its 30m range, it appears to be more in the hand-carry mobile scanning performance space than traditional handhelds.
Most DotProduct tablet-based handhelds in the market use a range sensor developed for video game (Wii) users, so it’s inherently short-range (3m) and suited to indoor use. The newest DotProduct systems uses an Intel RealSense range sensor (10m spec range) that makes it even more affordable and able to be used effectively outdoors.
The Mantis handheld is a fully integrated, second-generation unit (F6) that captures >600,000 pts/sec usable indoors or outdoors. Indoor Reality, a recent entrant, also offers an affordable handheld unit (IR500T), also short-range (<5m) with 190,000 pts/sec scan speed.
Altogether, thousands of handheld scanning units are already in the market.
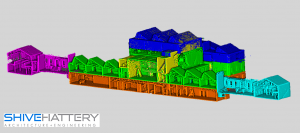
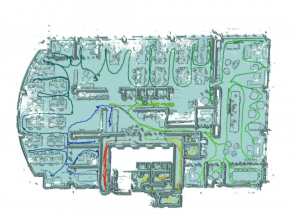
Although each individual walkaround scan is effectively registered within itself, multiple walkaround scans still need to be registered to each other. For this building, each color represents an individual walkaround scan. Credit: Shive-Hattery.
Advantages
When I dug into what mapping methods that walkaround mobile scanning has been replacing, I heard: 1) manual methods, i.e. tape/handheld laser distance meter and sketchpad or drawing markup, 2) static/stationary tripod-based scanning, 3) mobile vehicle-based scanning, or 4) doing nothing and living with the possible consequences of incomplete/inaccurate map or existing conditions information.
Advantages over manual mapping methods One walkaround scanning user discussed a project example that reminded me of the biggest advantage of laser scanning in general over manual methods: completeness and higher level of detail.
That example? The user described a project where they had used a walkaround scanning system for a plant as-built survey. Because my direct career experience in scanning was in high-end, tripod-based laser scanning, I was shocked to learn that a walkaround system was being used for that. In my world the high positional accuracy (e.g., 3-6mm) of high-end static laser scanners was needed for plant revamps to ensure accurate tie-point locations and to identify potentially tight clearances or clashes for pipe routing. I didn’t think that walkaround scanning accuracy (e.g., >1 – 2+ cm) would be accurate enough for plant projects.
As I further listened to the user describe the benefits of walkaround scanning, I understood. He explained they used to do those surveys manually, taking tape or handheld lasers to the site and either making sketches or marking up drawings.
During my career in laser scanning, whenever I talked with plant staff who had been using manual methods for as-builts, I never heard “We were off by a half-inch and it really hurt our project.” Instead, I would hear horror stories of things being off by a foot or more or key piping or structural elements being completely missing from as-built drawings, or equipment being 90º or 180º off its actual orientation.
When those types of incomplete and inaccurate as-builts are used as an input to revamp design, the risk of things going wrong during construction is greatly increased. Historically, plant revamp projects are notorious for going way over budget and schedule. So yes, compared to manual methods, walkaround mobile scanning is beneficial in providing a more complete and more accurate as-built survey.
Walkaround scanning is also often much faster (and more economical) than manual methods. Again, this can be a factor of 5x-10x in the field. It can also avoid costly “go-backs.” And, as one A&E firm president told me, based on the higher level of detail that scanning provides, creating accurate BIM models from point clouds is also faster (e.g., 2x) than creating BIM models from as-builts collected manually.
As a general observation, as the cost and ease of use of scanning continues to come down, it will increasingly be used to replace manual methods—a very large market opportunity.
Advantages over tripod-based static scanning This is the most common comparison that I hear from mobile scanning vendors and many users.
Far and away, the main benefit is field productivity, which translates directly to project-cost savings. Field-labor savings can vary widely, but typical examples come in at 5-10 times more-efficient in field labor and time. It’s big. I’ve heard user stories where traditional tripod-based scanning was initially explored, and clients felt it was too expensive. When then provided with the cost of walkaround scanning, the scanning proposal cleared the budget hurdle and received a green light.
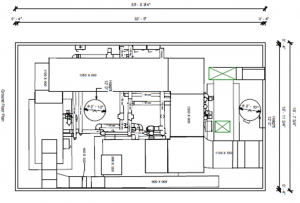
These standard deliverables—a 2D drawing and 3D model—were created from point clouds collected by a walkaround mobile scanning system. Credit: Concourse Federal Group.
Laser scanning, in general, offers the potential benefit (versus other mapping methods) of being able to be fit into small time windows that may be available for capturing a site or structure. Walkaround mobile scanning enables fitting data collection into even smaller and tighter time windows than tripod-based scanning, again a factor of 5-10 times smaller.
Based on size and not needing to be placed on a tripod or in a fixed position, many mobile systems are easier to use in small spaces than most tripod-based systems, and this turns out to be a common application for them. Typically, the more “built out” a space is, the more beneficial walkaround scanning is. Backpack systems can be awkward to use in some small spaces compared to hand-carry or handheld systems; pushcart mobile systems are also not suited to small spaces.
Hand-carry and handheld systems are also generally less intrusive to ongoing activities at a site, and handheld systems, by virtue of their ability to capture over, under, and around objects, can provide more complete scan coverage than other systems.
The output of walkaround mobile scanning systems is a fully “registered” point cloud, where all scan and image data are automatically integrated into a single point cloud. Some post-processing options may be available to tighten things up, but often there is no separate registration step that is otherwise frequently required for users of tripod-based scanning systems.
Registration of multiple point clouds is a critically important step when using tripod-based scanners, and it can be tricky and complex to ensure that it’s accurate. Since mobile scanning systems essentially do this step automatically, they are frequently seen as easier to learn and use. Users often don’t need to be as technically adept as those who use high-end tripod-based systems.
Walkaround systems’ overall ease of use, combined with generally lower prices than high-end tripod-based scanning systems, lowers the entry barriers for many organizations looking into getting into laser scanning.
Finally, since field times are shorter and often no additional time is needed for registration of point clouds, users can get to a final registered point cloud quicker than using tripod-based systems; hence, final deliverables can often be provided sooner to clients.
Advantages over vehicle-mounted mobile scanning systems The main advantage of backpack or walkaround systems over vehicle-mounted systems comes into play for urban mapping. Here, vehicles parked along urban roads create mapping occlusions for vehicle-mounted systems driving those roads. Walkaround systems are commonly used to supplement vehicle-mounted systems in such cases, as they are easily maneuvered around objects that block vehicle-mounted scanning and imaging.
Another advantage is that they can be used effectively without needing GNSS—in fact, many don’t have GNSS capabilities—so they’re used in parking garages, tunnels, underground mines, etc.
Advantages over doing nothing Since laser scanning first came on the scene, this alternative has always been a common option. Walkaround mobile scanning is influencing this space by providing an even lower-cost, easy-to-use option for getting complete and “accurate-enough” mapping. As such, it’s penetrating new layers of potential applications and users.
As another general observation, as the cost and ease of use of scanning continues to come down, it will increasingly be used to replace “doing nothing and living with the risks,” which also is a very large market opportunity.
Part 2 will cover specific applications where walkaround mobile scanning is gaining its biggest traction. It will also detail why these systems are gaining traction in those applications. Finally, no mapping solution is a panacea, so part 2 will also cover walkaround mobile scanning’s constraints.