
Above: Using a real-time PPP-capable GNSS rover on the Wicklow coast of Ireland. Credit: Niall Hand, Korec Group.
Has real-time precise point positioning finally hit prime time for surveying applications? The answer is a qualified yes.
The dream of being able to achieve survey-grade (2cm horizontal and 5cm vertical) GNSS-derived positions without post-processing, a base, network, radio, or cell service does sound quite appealing. This dream has slowly become real—but with certain qualifiers, and with unexpected additional functionality for broader applications.
Seven years ago in a two-part feature, we did a deep dive into the science and state of real-time precision point positioning (RT-PPP). We also speculated on whether such an approach to high-precision GNSS could eventually become a successor to RTK and network RTK (NRTK). We even went as far as predicting that RT-PPP would reach survey-grade performance levels within 5 to 10 years, especially in the form of commercial RT-PPP services like CenterPoint RTX.
Equal – Behind – Ahead
We were both right and wrong. Today’s RT-PPP is most certainly survey-grade—on par with RTK and NTRK for most applications, slightly behind for other applications—but it also enables you to do things that you could not do with any other high-precision GNSS positioning technology.
A reputed Chinese proverb goes, “People criticize a picture with their ear.” I fell into that trap seven years ago in our feature on RT-PPP, After RTK. An attempt at directly comparing to RTK and NRTK was missing a key point: It is not a matter of better or worse, but different. It is in those differences that the true strengths of RT-PPP can be found.
In 2012 we examined the early evolution of a commercial RT-PPP service (commercial R&D has made some of the greatest gains for PPP applications and services).
In this article, we pick up where we left off in examining that service: Trimble’s CenterPoint RTX. This is not an endorsement of this particular service, as there are several other fine RT-PPP services out there. But because we started years ago looking at this service and its utility for survey-grade uses, it makes sense to look at the advancement since then.
Within the RTX family of services are several different products (based on precision tiers for different applications). Their survey-grade service is called CenterPoint RTX; from here forward we refer to that trademarked service simply as “RTX.”
What Changed?
How did RT-PPP get to survey-grade in the intervening years since we took that first look in 2012?
Change has been constant across the board: the science of GPS and GNSS has not remained static (no pun intended). There are more satellites, more signals, but also more agencies, organizations, and private firms tracking, refining, and delivering the foundational elements needed to remove or reduce the sources of error inherent in GNSS positioning.
Whereas surveying and construction needs were the primary drivers for the development of RTK and NRTK in the 1990s, PPP was simultaneously being developed for precision agriculture, precise marine navigation, geodesy, and surveying/mapping work in remote places.
The original markets have broadened as PPP has become available in real-time, has become much more precise, and is being driven by burgeoning markets for automation and autonomous applications. Surveying and construction will most certainly be happy lateral beneficiaries of advancements in RT-PPP.
Before looking at recent improvements to this survey-grade positioning solution, let’s take a step back to look at PPP and real-time PPP—the evolution, current state, strengths, weakness, and unique utility for broader applications.
Observations and States

The evolution of standard approaches to real-time GNSS positioning.
In its coarsest form—autonomous and without augmentation—GNSS provides everything a standalone receiver needs to determine a position. This includes a signal (or signals), broadcast orbits, and clock corrections. Think of the clock and orbit data as “products.” Clock and orbit products have improved over time, and so has autonomous GNSS positioning, but one can only go so far with just those products.
To take precisions to a higher level, several observation-based differential solutions were developed to address other sources of error, such as delays in signals passing through the ionosphere and troposphere.
Surveying users, for instance, have become familiar with those sources and how they have been addressed by observation-based differential methods: RTK, baseline post-processing, network RTK, VRS, master-auxiliary, etc.
In addition to the broadcast clocks and orbits, an external source of observation-based “corrections” is added to the products that the receiver applies to resolve the high-precision position (e.g., via radio or the internet). With observation-based solutions, the efficacy of the correction products degrades over distance, tethering you to a base or densely spaced network and further to a mechanism for low-latency delivery of those “corrections.”
While the differential methods have improved over the past two decades, with moderate gains in the precision of RTK and NRTK, the biggest gains have been in availability—simply more satellites and signals. You might be able to get high precisions in places you could not in the past, but in terms of open-sky GNSS, the practical limits, measurable in centimeters, have remained much the same. RT-PPP does not yield higher precision but instead makes new augmentation methods possible and removes many of the functional tethers.
PPP takes a different approach, which is more about determining the current “state” of the sources of error over wider areas and turning those snapshots into products that can be added to the clock and orbits. These states can be effective over wide regions and can be packaged into very compact messages transmitted over the internet (in the same manner as NRTK corrections are cast over IP/NTRIP) but also via geostationary satellites (i.e. L-Band communications satellites).
The latter factor, the broadcast of PPP data over satellites, is perhaps the biggest functional benefit of RT-PPP: you can work practically anywhere, anytime (with the same sky-view considerations of any other GNSS positioning, of course)—with just your rover. There are a few Achilles heels to RT-PPP, but great strides have been made in overcoming those (more about that later).
What If …
When folks who are familiar with RTK and NTRK hear about RT-PPP, the first question they ask is, “Why not just do RTK corrections over satellites?” While some users have had modest success with getting NRTK corrections over sat modems, individual connections must be established, and there are latency issues.
More importantly, RTK/NRTK “corrections” are not at all like the PPP broadcasts. A single RT-PPP broadcast data can be applied by an unlimited number of rovers over an entire state, region, or small country.
RTK corrections are limited in efficacy over a very small area, say 10-15km in radius from a base station. And in the case of NRTK, the corrections (VRS, MAC, et al.) are customized to a similarly limited area around a rover’s location.
To cover a whole state or country you would have to broadcast from an L-Band satellite hundreds or thousands of individual observation-based correction messages. There would be practical bandwidth limitations, and dedicated Satcom broadcasts are prohibitively expensive. In contrast, RT-PPP could broadcast as few as six PPP message sets via geostationary satellites to cover most of the globe—and this is exactly what has happened.
High Precision for All
There are different value propositions for various GNSS positioning approaches based on resultant precision levels. These distinctions have narrowed as the high-precision approaches have expanded to the point where such capabilities have nearly reached mass markets. Here’s a look at the most common approaches.
Single point: Autonomous, uncorrected. Fast, inexpensive, not precise. Best suited for consumer-grade and coarse navigation.
DGNSS: Differential, short baselines, fast, inexpensive, moderately improved precision. Good for applications like asset and resource mapping. SBAS: Regional satellite-based augmentation systems (e.g., WAAS, EGNOS). Fast, cheap, but not precise. Good for navigation, some coarse mapping, and limited agriculture applications.
Post-processed: Not fast (expensive), can be highly precise, short baselines (and long baselines under specific conditions). Great for surveying, geodesy, and science.
RTK: Fast, requires base or infrastructure, time/cost improvements, baseline length limitations. Great for surveying, mapping, precision agriculture, construction.
Network RTK: Fast, requires infrastructure, time/cost improvements, longer baselines. Also great for surveying, mapping, precision agriculture, construction; no need for local base station.
PPP Post-processed: Not fast, but relatively cheap and can be very precise. Good for surveying, geodesy, mapping, and science.
RT-PPP: Precise, can be fast (depending on approach), and is cheap (but the best services are not free). Good for many surveying applications, mapping, precision agriculture, autonomous applications, and more (e.g. no need for local base station).
So, if RT-PPP is that good, why not use it for everything? Why don’t we see it on, for instance, every smartphone? There are limitations, and there is still a premium on equipment. You need a good antenna for one (the main reason why centimeter on a smartphone is an impracticality), but it also needs to be able to see the L-band satellites that broadcast the RT-PPP messages. And there are the twin Achilles heels of PPP: long convergence times and limitations on performance in the vertical.
The good news is that continuous R&D has made great strides in overcoming even those limitations.
Evolution of PPP
While PPP had its beginnings in the 1990s for natural resources management and scientific studies, it soon was used in agriculture and maritime positioning/navigation (although not very precise). R&D continued in academic circles but also by early adopters for expanded commercial markets (e.g., StarFire, StarFix, Marinestar, RTX, OmniStar, etc.).
Many of the academic PPP applications utilize clock and orbit products from global tracking networks like the IGS (International GNSS Service), a cooperative of scientific and public agencies contributing data from a global array of GNSS receivers/antennas.
While the data products from these public sources are free and in some cases can be accessed in real-time (via the internet), data related to various constellations may not be fully productized (often limited to GPS or GPS+Glonass) and are not as highly refined as those from the commercial/proprietary arrays. And the public services do not have the mechanism for satellite broadcast (i.e. L-band satellites).
There are many public PPP services (mostly for post-processing) openly available (e.g., AUSPOS, CSRS-PPP, APP, etc.), but often they use only the publicly available clock/orbits. Likewise, some commercial services rely on public clock/orbit products.
In fact, you could “roll your own” with open-source code for PPP processing. You could actually set up your own PPP service using publicly available data, but you might find your results limited to thresholds of old-school PPP.
I’ve experimented with this. It works but I don’t think that a “GPOS” service of my own is forthcoming anytime soon, plus the convergence times can range from 30 minutes to hours. The real gains in performance and real-time precision have been made by commercial providers; they have the market incentives to fund PPP R&D and operate global tracking networks of their own.



There are different approaches to real-time PPP, both commercial and academic, and the results can vary. We recommend that you examine various approaches (e.g. infrastructure and resources that encompass respective systems, support, services, and broadness of adoption) and test in a manner that would be applicable to your intended end use.
Research, Refinements, and Resources
In 2018 Trimble produced news releases and advertisements that openly referenced survey-grade via RTX. While those precisions had been available for years with RTX, the decision to go public with that characterization was more about the completeness of the global solution and additional features.
I recently interviewed Mark Richter, a geodesist who had for many years been involved with Trimble real-time solutions (e.g., VRS) as a product manager and support manager and engineer. He is now the director of strategic marketing for Trimble Advanced Positioning (which includes RTX). I had interviewed Richter many times over the past two decades of high-precision real-time GNSS and knew he could speak to the subject of RTX in terms familiar to surveyors who use RTK and NTRK.
As Richter put it, “The new performance specs—we refer to it as repositioning RTX. There are multiple aspects: 2cm is what we refer to as survey-grade accuracy in horizontal and up to 5cm in vertical.”
I had been trying RTX over the years, and before we pulled the trigger on concurring with this “survey-grade PPP” article I did the tests again and concurred that it performed to the stated survey-grade levels, and often a little better.
Richter related that the same Trimble team that gave birth to the popular VRS solution for network RTK has done much of the development work for RTX. They have also incorporated lateral elements of RTX development into the flagship VRS solution suite (known as Pivot and RTXNet). To take PPP from the coarseness of simple clock-orbit solutions to survey-grade took a lot of R&D and investments in global infrastructure.
Regarding refinements to the basic PPP solutions, the essentials are adding to the clock and orbit data, algorithmic enhancements to reduce the ionospheric effects, and tapping global ionospheric models. Richter said, “Trimble has established a tracking network of over 120 ground stations globally, using our own receivers and antennas, with highly refined noise models and absolute antenna models.”
Adding to this satellite bias data, the precisions have steadily improved to today’s 2cm x 5cm (not that far off RTK). The convergence time for standard RTX globally has dropped over the years; in general, you would expect to get to 20cm in about 7-8 minutes and to 2cm in about 13-15 minutes. But that has changed dramatically (more about the “fast” solutions later in this article).
To give you an idea of just how good such tracking-network products can be, consider (as Richter said) that typical publicly available broadcast orbits “can have uncertainty in orbits by as much as 100cm, with predicted orbits nearing 3cm [available as often as every 6 hours], and final orbits can be 1-2cm [available weekly or bi-weekly].”
Contrast that with the RTX ability to model orbits that Richter said “are near a centimeter in real time. Orbit quality has a very direct effect on positioning quality.”
But other factors get applied, like satellite biases. For example, in the utilization of multiple constellations, there are differential code biases that can be taken into account, and Trimble computes these as well.
Richter said that RTX tracks and processes the major constellations (GPS + Glonass +Galileo + Beidou + QZSS); provided that your rover can utilize the same, you are able to use the service to its fullest capabilities. He noted that the service was now on its eighth generation of servers and that development continues. Their intention is to constantly improve and expand the services.
The RTX service specifically has been implemented on Trimble’s own newer rovers, some Spectra rovers, and several third-party models that utilize Trimble OEM receiver boards (e.g. Hi-Target). To use RTX with a compatible rover you will also need to subscribe to the service.
Some elements of R&D for RTX have also helped improve VRS networks. Trimble makes the same clock and orbit data available to operators of VRS networks and accommodates the code-bias modeling for every individual station in a network. In the VRS network software Pivot, this crossover resource is present in the new generation of RTXNet processing modules. VRS network operators can also use real-time RTX (both on compatible base receivers and in the network software) to monitor the positional integrity of the reference stations.
The Pivot system also can use live RTX positions to better apply modeled data (that is referenced to ITRF) in real-time; this is known as dynamic station control (DSC) and is of particular value in refining network corrections that include stations tracking and processing multiple constellations.
There are interesting scientific uses of RTX, as well. Geologists at Central Washington University run RTX live on Trimble NetR9 reference receivers and output 1Hz positions via NMEA to add to their plate-velocity data-aggregation system. RTX running standalone on a reference station also enables a network operator to establish a new ITRF reference position within 1-15 minutes after an earthquake.
Note that public safety and disaster response could benefit greatly from standalone (no infrastructure needed) high-precision GNSS (but we’ll cover that in a subsequent article).
There is another fast way to converge: if you start on a known point (with a current ITRF position keyed into the rover), you can converge in half a minute or less. When converged by any method, you can maintain the high precision as long as you can ensure that the flow of PPP corrections continues (i.e., stay in view of the L-Band satellite delivering the PPP data).
If there are short interruptions of up to two to three minutes, you can still continue, and if the gap is longer, you could simply set up on a previously recorded point and re-converge quickly. It is not “calibrating” to the previous point but simply speeding up the convergence.
That the solution can keep going after the loss of correction connections for minutes is a feature leveraged by PPP providers like Trimble. In their case, it is called xFill. A common scenario for the use of xFill is a rover doing RTK or VRS, and when the cell connection is lost or spotty, the RTX (that has been running in parallel and is already converged) can take over from the RTK or VRS. The solution does not deteriorate for several minutes—time enough to get a few more critical shots.
PPP provides discretely derived positions, not dependent on any other positions. It is just your rover deriving a position relative to the ECEF (Earth-centered Earth-fixed) reference framework (any transformations or projections are done in your data controller software).
As Dr. Dru Smith of the National Geodetic Survey has said (regarding the NGS plan to move to an ECEF reference framework in 2022), the center of the Earth is the one survey monument that could never be disturbed by a bulldozer (or subsidence, earthquakes, and rapid plate tectonic velocities). We are truly moving towards a more dynamic and Earth-centered way of geodesy and surveying, with more active control and reliance on satellite-based solutions. PPP inhabits that environment by default.
Faster
The next big development available across Europe and parts of the U.S. is called “RTX Fast.” By utilizing data from semi-dense networks (i.e., 100km-200km spacing) of reference stations (e.g., set up for that specific purpose, or from public stations, or from partnering with real-time networks) better ionospheric data reduces the convergence time to less than a minute. An example said Richter, “is in the U.S. Midwest, where RTX Fast has been implemented to support mainly the precision agriculture [market in that region] but also now other parts of the U.S. and near full coverage in Europe.” Coverage is evolving rapidly, so check their website for specifics.
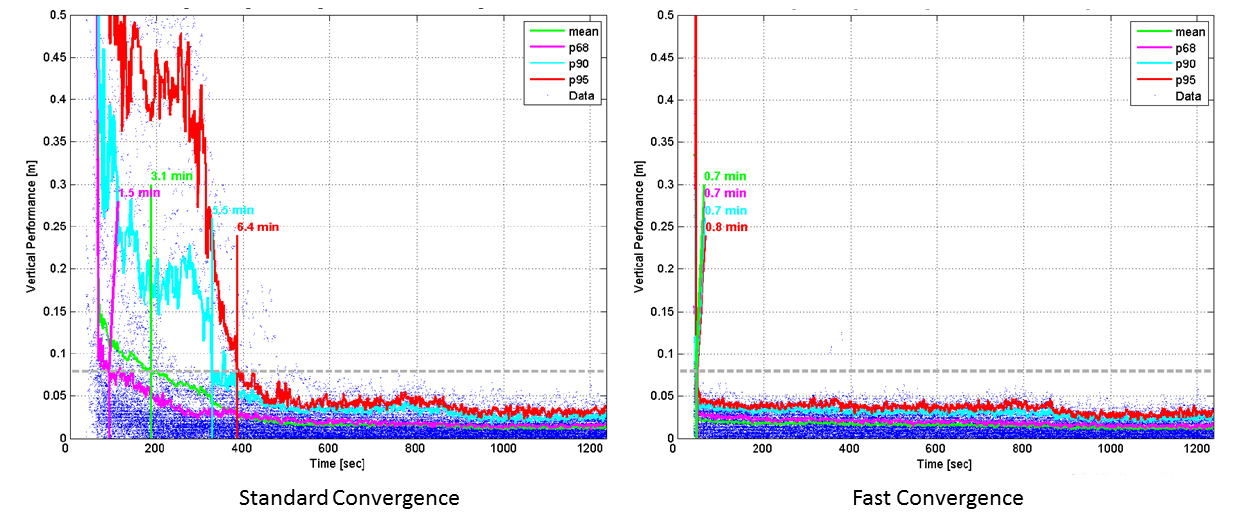
By utilizing data from semi-dense networks (i.e., 100km-200km spacing) of reference stations, standard convergence times (left, as offered by standard RTX) can be reduced to under a minute (right, as does RTX Fast).
Another driver (no pun intended) for expansion of a fast service is rapidly growing mass-consumer markets like augmented/autonomous vehicle navigation. In fact, said Richter, RTX is already in GM’s Super Cruise hands-free highway driving system available on some models of cars like Cadillacs. The potential for such markets using the integrated systems we read so much about (e.g. combinations of inertial, GNSS, lidar, cameras, sonic, and other sensors) for aerial platforms, precision robotics, construction automation, etc., is tremendous.
Note that many of these expanded markets are concerned mainly with horizontal precision and not vertical. Even for many surveying applications, vertical is also not a critical factor. RT-PPP is still weak in the vertical. It is unlikely that this could improve dramatically, as one of the remaining sources of error (that other high-precision approaches like RTK and VRS can address) is tropospheric (localized weather conditions).
Apart from that, the solution is in many ways truly survey-grade, but unlike RTK/NRTK you are “untethered” from infrastructure.
But how will RT-PPP play out with existing high-precision markets? Will it supplant legacy solutions or simply be a complementary tool?
Competitive or Complementary?
At a national meeting of real-time network operators I attended in Columbus, Ohio in April 2019, the subject of RT-PPP services was raised, specifically how they might impact traditional networks. The consensus was that these are quite different services, and, especially in the case of the growing autonomy markets, traditional RTK and NRTK are not practical for mass applications.
Networks and PPP will serve different markets, but in many ways these services might be more complementary than competitive. For example, we have large areas with no communications in our state, and RTX can be a way to do the work directly or to establish control to set up a base. I know surveyors who do this in various parts of the country.
I asked Richter the same question, as Trimble is an example of a firm that provides both. “There is a misconception about what is it that we are trying to do, and why are we in both the geospatial and the survey world, and why are we trying to bring RTX to the table. We have a very successful technology in place, VRS—it is a de facto standard. Wherever there is ground infrastructure in place VRS is being used.”
Richter added, “Our goal is not to go suddenly into these areas and say, ‘Hey, we now have RTX so we can forget about the other stuff.’ RTX is a great complement to VRS.
“Some of the challenges of networks is communications—if it is down you cannot continue your survey. But taking advantage of a byproduct from RTX, xFill kicks in when comms is down or gone, and you can continue to work. Where there is already infrastructure, it is an add-on and helps you perform better, as well as where there is no infrastructure.”
Richter calls the places where there is no infrastructure “white space,” the places between networks and where there are none.
“Parts of Asia, [Central] and South America, Africa: they have a growing demand for more and more precision. Needs like building out a cadaster: How would they do that or a large project without having to fund a lot of infrastructure and communications?” asked Richter.
“That is where PPP [is] a good choice; you don’t have to worry about anything else. You just take your [RTX-capable] rover out and do your work. This is to a level of accuracy [in real-time] that you were not able to achieve without a network.”
Why RT-PPP?
More choices. We now have so many new or updated technologies at our fingertips. And, as long as users can keep in mind that their job is to ensure that the tools are applied properly and that equate to verifiable accuracy, then there is room in our toolboxes for any number of new tools and solutions, from updates to the legacy technologies (like imaging and scanning total stations) to new waves of self-registering scanners, UAS, and more.
GNSS was not going to remain static. If you know something about RTK/NRTK, you are aware of its limitations and weaknesses. It has been out there for decades and still provides the highest accuracies for real-time, but it was inevitable that RT-PPP and services like RTX would come along, address the weaknesses, and inject high-precision real-time GNSS into non-traditional markets—even mass markets.
But it also provides another great—complementary—option for traditional high-precision practitioners. If you haven’t tried such services yet, try it. It may surprise you.