
Performing construction work in an operating airport is a complex and challenging project.
Doing so in the 20th-busiest airport in the world requires an experienced team, an innovative approach, and even, thanks to Boston Dynamics, a robotic dog named Spot.

Spot, the robotic dog from Boston Dynamics, equipped with a Trimble X7 scanner.
With its internationally recognized snowy-peaked roof design and award-winning hotel extension, the airport owned by the city and county of Denver has demonstrated its innovative and visionary culture since it opened in 1995. In that spirit, the Great Hall renovation is a multiple-phase project to increase open space within the airport, improve the customer experience, and enable safer and intuitive passenger flow.
The current phase of the project focuses on the center of the terminal with new ticketing pods and checked baggage systems. A key aspect for success in such projects is thorough pre-planning, said Drew Rebman, a VDC engineer at the Hensel Phelps Construction Group, which the Denver Department of Aviation selected as the general contractor and construction management partner. Detailed pre-planning helps reveal undocumented assets, resolve potential safety issues, identify deviations from existing as-built documents, and solve discrepancies between the site conditions and the design. Hensel Phelps, a company with a wealth of experience and knowledge in airport construction, uses laser scanners throughout the construction project for quality and production control.

The point cloud data generated from the Trimble X7 laser scanner is analyzed on-site and compared to a 3D BIM model of the design to identify potential discrepancies.
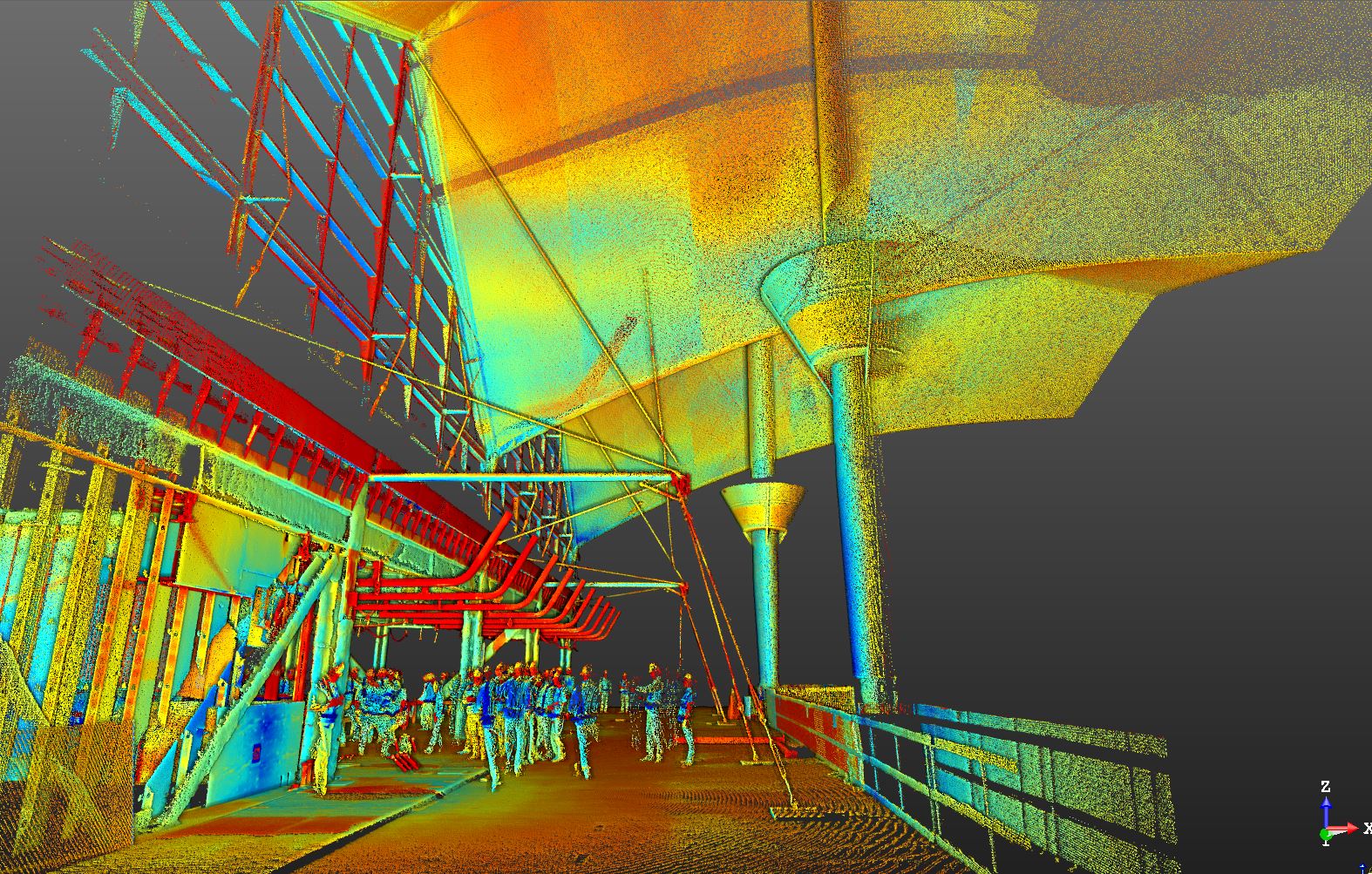
The point cloud data generated from the Trimble X7 laser scanner is analyzed on-site and compared to a 3D BIM model of the design to identify potential discrepancies.
During pre-planning, the scanners are used to capture the details of the existing structure, a method that provides rich and highly accurate output and eliminates the labor-intensive manual measurement process.
The Challenge
Multiple scans are needed to capture the as-built conditions of a project like this. Typically this means a scanner operator is required to carry the optical equipment and a tripod from point to point in the terminal and wait at each point for the scan to be completed. A full set of scans can take several hours, or even days, to complete.
During this time, the operator is required to be nearby, exposed to the complex workspace environment. A solution that enables remote operation, frees on-site workers from repetitive work, and allows the team to focus on more demanding tasks can help overcome the current workflow limitations.
The Solution
To further improve data collection efficiency and the safety of the on-site team, Hensel Phelps decided to explore the integration of robots in the scanning workflow. A Boston Dynamic’s Spot robot with an integrated Trimble X7 scanner was deployed on the project, performing scans, and capturing 360-degree images of the site.
Spot is a quadruped robot with spatial perception. It can carry up to 30 pounds of payload and maneuver in unstructured and dynamic environments such as construction sites. Trimble X7 is a compact, high-speed 3D laser scanner. The X7 produces point clouds with up to two-millimeter scanning accuracy and high-resolution panoramic images. Its unique auto-calibration, self-leveling, and automatic in-field registration capabilities are a must to have for an autonomous scanning workflow.
The Workflow
The integration of Spot with the Trimble X7 is done through a Trimble software on top of the Boston Dynamics software development kit (SDK). The software gets information from the Spot mission system and initiates a scan at pre-defined waypoints.
There are two basic working modes. The first one is an ad-hoc mode in which the user remotely controls Spot, navigates the robot to the required location and triggers a scan. The second mode is autonomous and is based on a planned mission with waypoints in which the Trimble X7 performs scans. With the latter mode, the integrated solution follows a pre-defined path and performs scans autonomously.
The Hensel Phelps team utilized both manual and autonomous modes in the Denver terminal. The output point cloud files were automatically transmitted to a Trimble T10 tablet via the X7 local wi-fi and auto-registered in the field using Trimble Field Link software. This process helped verify that the entire space has been captured, reducing the risk of return visits – an especially important capability in this type of projects where access permits and logistics can cause delays. The captured as-built information was compared to a BIM model of the design to eliminate surprises and delays during construction.
The point cloud data generated from the Trimble X7 laser scanner is analyzed on-site and compared to a 3D BIM model of the design to identify potential discrepancies.

Boston Dynamics’ robot dog Spot waits to be called into use in a reconstruction project at Denver International Airport.
Into the Future with Boston Dynamics
The Hensel Phelps team believes that robots will be part of the future workforce, working side by side with humans and performing dull, repetitive, and dangerous tasks.
“The potential benefits of in-field robotics are huge, and the partnership between Trimble and Boston Dynamics is exciting news,” says Jeremy Sibert, director of technology at Hensel Phelps. “Robots can help improve productivity, quality, and most importantly the safety of our on-site teams. It is an exciting journey and we are looking forward to further integration of autonomous robots in construction workflows.”