
UAS-based Topobathymetric Lidar Surveys
Understanding stream channel and floodplain morphology is critical for a number of efforts—from hydraulic modeling and stream-restoration design to aquatic habitat assessment. These applications require description of conditions both inside the channels and in the adjacent riparian zones. Gathering these data has typically relied on individuals on the ground or in boats taking measurements in small areas, or manned remote sensing flights that are designed to cover much larger expanses.

The Riegl RiCopter, equipped with Riegl VUX-SYS lidar sensor and Sony 6000 digital cameras, along the bank of the Deschutes River.
The advent of small unmanned aerial systems (sUAS), combined with innovations in sensor technology, is changing the equation for surveyors. These advancements give surveyors the power to do detailed elevation mapping over larger swaths than conventional ground/water-based surveys while providing greater detail at a potentially lower cost than manned flights.
Quantum Spatial Inc. (QSI) recently teamed with Riegl to evaluate use of interchangeable bathymetric and terrestrial laser scanning sensors that could be used on sUAS platforms to support riverine mapping applications. QSI tested Riegl’s new bathymetric depth finder (BDF-1) and the Riegl VUX-SYS laser scanning system in three distinct riverine environments. The sUAS-based sensors were evaluated for their potential to efficiently collect channel geometry in areas where the water was not easily accessed or it was too dangerous to use ground- or water-based methods.
The Evolution of Topobathymetric LiDAR
Traditional survey methods for collecting bathymetric data in shallow water areas, such as riverine environments, can be highly labor-intensive and dangerous. Oftentimes individuals have to wade through the water, collecting cross-sections of depth measurements. But these efforts can be hampered because some areas are too deep or fast-moving to safely wade. Boat-based sonar also is used, but these surveys can be limited by shallow water, rapids, or the inability to access a certain area because it resides on private property or is surrounded by challenging terrain.
A relatively recent advancement involves commercial airborne topobathymetric surveys, which combine data about water depths and surrounding land elevation. For the past five years, QSI has deployed topobathymetric (i.e. green wavelength) lidar sensors on manned aircraft for continuous, high-resolution elevation mapping of rivers, estuaries, and near-shore coastal areas. These airborne surveys range from small sites to several hundred miles of river, typically covering the full extent of adjacent floodplain and inland topography.
The new Riegl BDF-1 sensor introduced the possibility for a sUAS-based method to collect riverine data at a scale that is designed to fill a data gap between ground-based or water-borne surveys and manned airborne lidar, in a cost-effective, efficient, and safe manner.
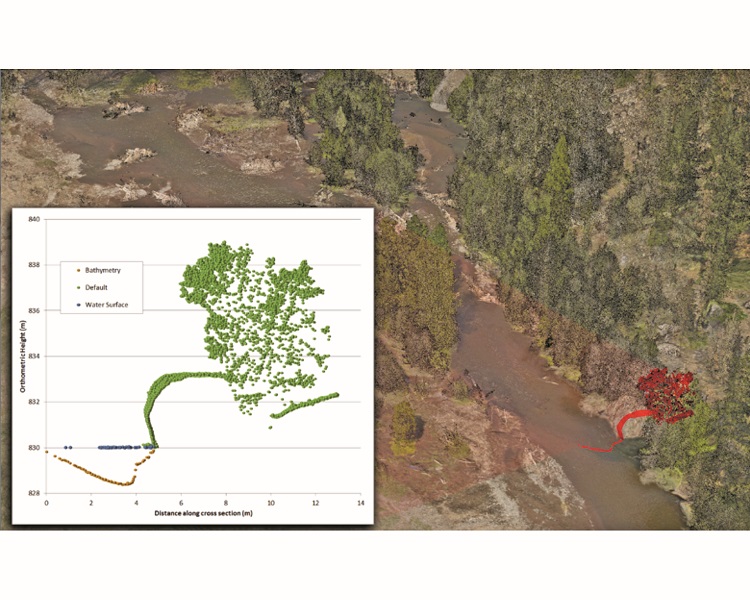
Lidar point cloud off of Whychus Creek colorized using RGB imagery. The inset shows a bathymetric cross section collected using the BDF-1.
Pilot Project
Working with Riegl, QSI set out to evaluate how cutting-edge sUAS-based sensors could enhance stream mapping at local spatial scales. The goals were threefold:
- test operational feasibility, accuracy, and efficiency of sUAS-based technology for riverine mapping;
- assess if the technology can replace, complement, or enhance existing methods; and
- explore how a sUAS-based bathymetric depth finder could be used as part of broad-area topobathymetric lidar surveys.
QSI selected three streams in Oregon where active restoration activities were underway. Each stream represented a different channel morphology and had existing or planned bathymetric data measured by the traditional techniques:
- Upper Deschutes River – A medium-sized river that was too deep to wade for manual cross-sections. An engineering design firm had previously collected boat-based, single-beam sonar data to support hydraulic modeling to assess habitat availability under different flow regimes.
- Whychus Creek – A small mountain stream that was difficult to access because it was surrounded by steep canyon walls. The U.S. Forest Service was interested in this area for restoring river morphology and riparian conditions.
- Willamette River – A large river system with complex morphology, where various federal and local agencies were conducting floodplain modeling and assessing the habitat for endangered fish species. QSI had previously collected airborne topobathymetric lidar, which was supplemented in deep areas with boat-based sonar.
Given the goals of the project, we spent one full day at each restoration site and mapped as much are as possible using the Riegl RiCopter, which consisted of an octocopter platform, navigation system (GNSS, IMU) and a flight management system. The RiCopter (re-designated the BathyCopter when equipped with the BDF-1 sensor) was ideally suited for this study because it could carry either the BDF-1 or the VUX-SYS lidar sensor. The RiCopter has a flight endurance of 30 minutes per battery, and batteries could be quickly swapped to enable sequential missions at each location. All missions were conducted following FAA Part 107 regulations, which include a maximum flight altitude of 400 feet and continuous line-of-sight with the aircraft.
The RiCopter equipped with the BDF-1 was flown at an average altitude of ~15m (49.2 ft) above the water surface. The BDF-1 pulses a green laser ( = 532 nm) at an 8 degree off NADIR look angle and a depth rating of 1.5 secchi depths. The sensor has a pulse repetition frequency (PRF) of 4KHz, but averages every 10 pulses, resulting in an effective PRF of 400Hz. While the RiCopter can be pre-programmed to fly a designated flight plan, the team chose to fly the aircraft manually due to the height of the surrounding vegetation, which often exceeded the operational flight altitude. The pilot flew cross sections perpendicular to the stream channel to emulate ground-based or single-beam sonar methods.
For each site, the BDF-1 sensor was swapped in the field for the Riegl VUX-SYS lidar sensor and two Sony 6000 digital cameras. The sensor and battery swap took about 30 minutes to complete. The VUX-SYS is a topographic lidar sensor ( = 1064 nm) designed for sUAS applications and has a field-of-view of 230 degrees and a PRF of 350KHz. The VUX-SYS sensor was flown longitudinally along the stream centerline at an altitude of ~70 meters (230 feet) in order to capture the near channel topography and riparian vegetation.
To support the airborne survey, QSI deployed a static GNSS base station each day and collected real-time kinematic (RTK) checkpoints for both terrestrial and bathymetric surfaces.
The Results
The VUX-SYS sensor acquired terrestrial elevations at an average density of 532 pulse per square meter (ppm) and a laser spot size of 3.5 cm, resulting in an incredibly robust data set within the immediate riparian zone. For each site, the lidar data were compared to the RTK checkpoints collected within the floodplain. Assessed absolute accuracies ranged from 1.6 cm RMSE on Wychus Creek to 4.6 cm RMSE on the Deschutes River.
sUAS-based lidar data within the immediate floodplain on the Deschutes River was collected at a pulse density of 532 ppm and an assessed accuracy of 4.4 cm RMSE within the floodplain. The data enabled measurement of terrestrial features that would be difficult to resolve using conventional ground-based techniques.
Using the BDF-1 sensor, we were able to successfully map full channel cross sections on the Deschutes River with depths reaching to 1.82 meters and point densities exceeding 18 ppm. Secchi depths were measured to assess water clarity, but only the deepest parts of the channel exceeded 1-secchi depth. A total of 12 cross sections were measured on the Deschutes River and were integrated with the terrestrial lidar data. Visual inspection indicated that the channel geometry measured with the BDF-1 was consistent with the existing bathymetric data measured using single beam sonar. However, a quantitative accuracy assessment has been problematic due to a number of factors including measurement error, small-scale stream bed variation and temporal differences between surveys.
In addition to assessing the technical performance, we also wanted understand the operational feasibility of sUAS-based stream mapping. In order to reach the restoration site, the team had to pack the sUAS platform, sensors and a store of batteries down a forest trail for several hundred meters and then scout for suitable take-off and landing sites. Tall trees along the river edge were an issue, which necessitated careful planning and maneuvering of the sUAS in flight. These considerations resulted in longer set-up times. Missions were efficiently conducted, but the 30 minute endurance required multiple lifts to cover a relatively short section of river. In addition, the river sinuosity, combined with the low operational altitude and bankside vegetation, required multiple operator locations to maintain line-of-site with the aircraft.
Whychus Creek is a relatively small, clear stream where we were able to successfully map bathymetric cross sections along the full extent of the study reach. Measured depths ranged from 30 cm to 1.6 meters and we were able to align the terrestrial lidar data and the bathymetric data at the land/water interface. We were not able to quantify the bathymetric accuracy since RTK checkpoints and BDF-1 cross sections were not acquired at exactly the same location. Similar to the Deschutes site, great care and planning was required to maneuver the sUAS platform around the sometimes dense bankside vegetation (Figure 1).
On the Willamette River, the BDF-1 consistently measured depths down to 3.4 meters, but it was unable to record full cross sections the much deeper river. Secchi depths recorded at the time of the survey were an average of 1.8 meters, indicating that the extinction depth was consistent with the 1.5 secchi depth rating of the sensor. A total of 18 partial cross sections were measured on the river and visual inspection indicated consistency in both channel geometry and depth when compared to the bathymetric data collected later in the year with Riegl VQ-880-G sensor.
On a deeper river, such as the Willamette, the current sUAS-based approach is not practical for replicating traditional methods given the need to supplement cross sections using boat-based methods. However, the laser wavelength and depth performance of the BDF-1 is the same as existing airborne topo-bathymetric lidar sensors (i.e., Riegl VQ-880-G), which offers interesting opportunities for using the sUAS technology to inform and support large broad-area surveys. In this role, the BDF-1 data can provide spatially distributed validation data (water surface, stream bed) to help assess accuracy from broader area surveys. In addition, the BDF-1 might be used to measure turbidity at different sites to inform flight planning and set realistic expectations for depth coverage. These are important considerations for firms like QSI that collect shallow-water topobathymetric lidar over hundreds of square miles of coastline or rivers.
We did not attempt to estimate the time or cost savings associated with a sUAS-based approach due to the wide combination of variables associated with riverine applications, such as unique project requirements, reach length, channel complexity, and flow conditions. In general, the sUAS-based approach offered a viable technical alternative for measuring bathymetry on study sites that are too difficult or dangerous to access using traditional boat- or ground-based surveys. Whychus Creek provided a good example of a small, remote stream that would be time-consuming to ground survey but was effectively and safely mapped with the BathyCopter.
While this project focused mostly on the BDF-1 sensor, a very appealing aspect of the results was our ability to easily collect high-resolution terrestrial data with a professional-grade lidar sensor using the same sUAS platform. Floodplain topography and/or riparian conditions are required for almost all riverine applications and ground surveys within the floodplain can be very inefficient due to terrain variability, dense vegetation, islands and other factors. The VUX-SYS sensor was able to fly above the vegetation and collect elevation data at a accuracy and density that would be extremely difficult using ground-based methods. The ability to collect both bathymetric and terrestrial elevations in the same field deployment could prove very economical.
Potential of sUAS-Based Riverine Surveys
The project successfully demonstrated that a sUAS-based bathymetric lidar sensor (Riegl BDF-1) could accurately measure channel cross sections on stream reaches. The sUAS-based sensors provide an alternative to traditional survey methods in areas that are difficult, dangerous or inefficient to access. Of course, the utilization of airborne bathymetric lidar (manned or unmanned) requires understanding the project site characteristics, the needs of the application, and the essential strengths and limitations of the technology. The depth performance of any bathymetric lidar sensor depends on water clarity at the time of the data collection, bottom reflectivity and the presence of aquatic vegetation or algae in the water column.
In the near term, there are still logistical hurdles to address related to sUAS usage, including site access, battery life, and FAA regulations. Because FAA regulations currently require line-of-site visibility and operations away from populated areas and airports, they effectively reduce the number of project sites that can be surveyed with an sUAS platform without seeking special FAA exemptions. In fact, one restoration site that was originally proposed for this project was rejected because it was close to a municipal airport, while others were rejected due to their proximity to populated areas. The good news is that the FAA is continuing to pursue new regulations that will safely integrate sUAS into the national airspace, eventually enabling operations beyond visible line-of-site that will result in more efficient operations along river corridors and over large spatial extents.
Field productivity also was limited by the need to replace the battery after every half hour of flight time. While not a significant issue for this project, the need to maintain and carry batteries may represent some logistical challenges depending on the project location and access constraints. As sensor and battery technology continues to advance, we expect longer flight times, which will improve efficiencies and enable coverage of larger territories. The addition of a scan mechanism, rather than simply a depth profiler, also would enhance the utility of the BDF-1 sensor by enabling greater flexibility in flight operations and collection of more continuous bathymetric data.
Having worked closely with many river engineering firms and agencies responsible for aquatic habitat monitoring, such as the U.S. Forest Service, we see a real need for sUAS-based lidar. This new platform can potentially provide richer data sets that not only describe channel geometry, but also offer insights to the complexity and variability of the surrounding floodplain.
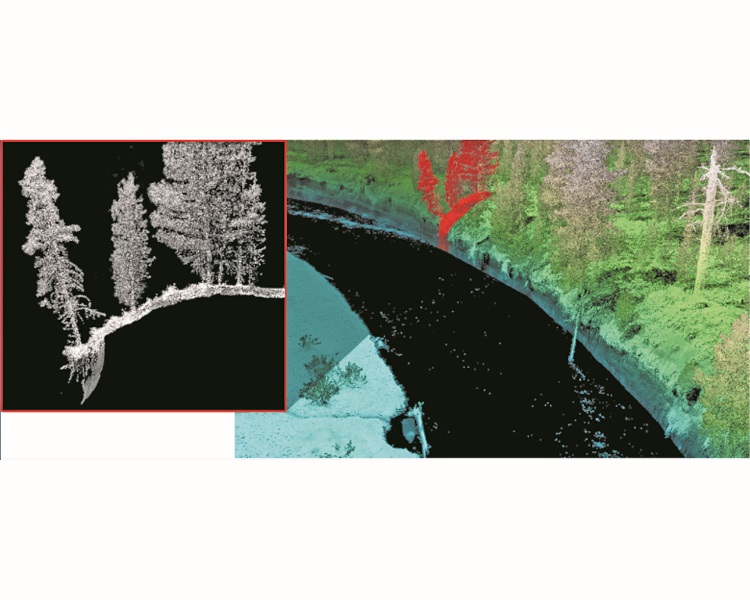
For example, manned airborne lidar surveys are flown at higher operational altitude resulting in typical pulse densities of 8-30 ppm depending on sensor and aircraft configuration. sUAS-based surveys are conducted at a lower altitude and at a slower flight speed resulting in much higher density point clouds (> 500 ppm) and with much smaller laser spot sizes (< 3.5 cm) While not within the scope of this project, these highly detailed data sets offer interesting opportunities for extracting features, such as woody debris and surface roughness, which are just starting to be explored (Figure 2).
A natural response to an emerging technology is to evaluate how closely it replicates existing approaches followed closely by a determination of cost or time savings. While this is a logical starting point, this approach often does not capture the full value of the technology. Frequently we seek an sUAS-based approach in hopes of finding a less-expensive solution rather than a better, more robust solution. In this study, we found the BDF-1 sensor can replicate existing single-beam sonar or ground-based approaches and also can inform broad area topobathymetric surveys under the right conditions. However, we also found that the ability to collect terrestrial data using the VUX-SYS sensor provided terrestrial elevation data that far exceeded the density and accuracy achievable with current methods.
As logistical hurdles are resolved, technology advances and operational protocols are developed, we expect sUAS-based topobathymetric lidar will progressively become a more valuable data source for river engineering and habitat-assessment applications.