As part of a bachelor’s thesis project, a university student successfully scanned more than 21,000 sq ft of complex office space in just 40 minutes with a mobile 3D laser scanner (the GeoSLAM ZEB-REVO), despite having never previously used the device. The point cloud created from the first-time scanning work was sufficient to generate an impressive 3D BIM of the office.
Participating in an assignment to evaluate various indoor mapping systems, the student from the University of Applied Sciences, Würzburg-Schweinfürt, in Germany, received just 15 minutes of training in the use of the equipment from Laserscanning Europe, one of GeoSLAM’s German distributors. The project area was confined to the sixth-floor offices of Stuttgart Airport.
In preparation for the onsite work, the student obtained a 2D floorplan from the airport GIS to plan the scanning route. While many interior spaces are accurately mapped with the handheld unit by making a single large loop that starts and ends at the same spot, the airport office layout did not allow for this. The student planned eight small scanning loops, which included stepping into small offices and overlapping with other data-collection loops. The data overlaps would be required to register the eight scans into a single point cloud.
Once onsite, the student began scanning immediately. Compared to terrestrial laser scanning, there was no equipment or targets to set up; the only site preparation was propping open office doors. The student proceeded to scan the office space holding the 2 lb. ZEB-REVO in his hand, with the battery and data storage safely stowed in a backpack. Moving at normal walking speed, data collection occurs at a rate of 43,200 points per second.
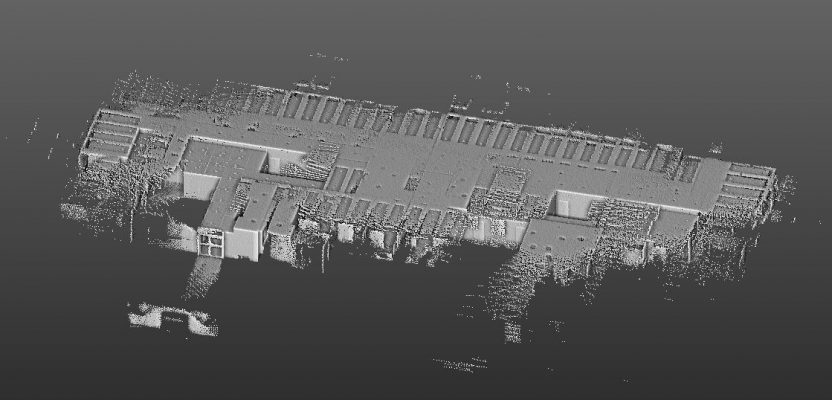
Upon completion of the scanning, the student used GeoSLAM Hub software to register the eight individual scans with a simple cloud-to-cloud registration technique. The student then exported the final merged point cloud into AutoCAD Civil 3D and generated a high-quality 3D BIM of the sixth floor as a ReCap file.
The student offered the following lessons learned for future projects:
- To ensure registration of scans, the user should collect additional data points in the overlap areas either by slowing their walking speed or elongating the overlap region itself—a minimum of 20% overlap of point clouds is recommended.
- To avoid excessive noise in the collected data, highly reflective surfaces such as glass windows, walls and doors—which were plentiful in the airport project area—should be covered prior to scanning.
Top image credit: Giacomo Klopfer
 This article appeared in xyHt‘s e-newsletter, Pangaea. We email it twice a month, and it covers a variety of unusual geospatial topics in a conversational tone. You’re welcome to subscribe to the e-newsletter here. (You’ll also receive the once-monthly Field Notes newsletter with your subscription.)
This article appeared in xyHt‘s e-newsletter, Pangaea. We email it twice a month, and it covers a variety of unusual geospatial topics in a conversational tone. You’re welcome to subscribe to the e-newsletter here. (You’ll also receive the once-monthly Field Notes newsletter with your subscription.)