From Science and Engineering to Your Hydrographic Toolkit
“The complexities of and incubation times for advancing instrumentation are often not fully appreciate ”—T. Curtin, E. Belcher, Innovation in Oceanographic Instrumentation (2008)
Extraordinary—yet mostly unseen—innovations continue to shape the tools surveyors use on water and land: innovations in science and engineering for hydrography, oceanography, robotics, and global navigation and positioning; these support defense and environmental research as well as oil, gas, and mineral exploration.
 Thomas Edison, who established one of the first great industrial research laboratories in Menlo Park, New Jersey, also envisioned such an initiative to serve national interests. In the tense days before World War I, Edison proposed that the United States “should maintain a great research laboratory” in which “could be developed all the technique of military and naval progression without any vast expense.” In just a few short years after his proposal, the Naval Research Laboratory (NRL) was established along the banks of the Potomac River near Washington D.C.
Thomas Edison, who established one of the first great industrial research laboratories in Menlo Park, New Jersey, also envisioned such an initiative to serve national interests. In the tense days before World War I, Edison proposed that the United States “should maintain a great research laboratory” in which “could be developed all the technique of military and naval progression without any vast expense.” In just a few short years after his proposal, the Naval Research Laboratory (NRL) was established along the banks of the Potomac River near Washington D.C.
More research facilities were to be established around the country and world, both private and public, some by the Office of Naval Research (ONR), academic institutions, oil exploration companies, marine construction, and shipping interests. Many of the basic tools of modern measurement for surveying, hydrography and more have grown from these research and development incubators, together with their non-naval/marine counterparts.
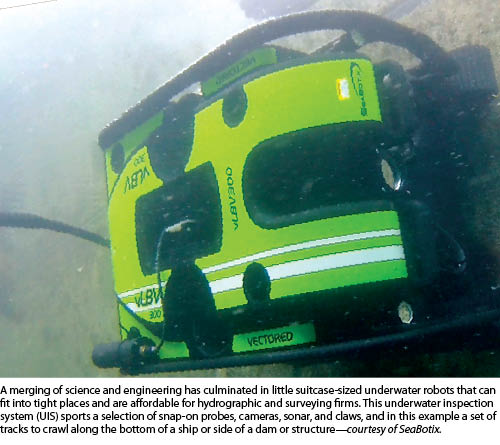
As these tools become more accessible and affordable, the potential for expansion of services by surveyors and the profession can grow. You are probably familiar with the new wave of affordable and complete single-beam and multi-beam hydrographic surveying systems like those from Seafloor Systems, and you might be seeing more media coverage of the compact and affordable underwater inspection systems (UIS) robots from such providers as SeaBotix. Such solutions came from many decades of research and development,out of sight and mind of most of the general population.
PSM sat down with two noted naval and oceanographic research scientists who have had overlapping tenures with various ONR projects and facilities to gain insights into how such instrumentation goes from pure science to commercial productization.
Dr. Steve Ramberg is the chief of naval research chair with the National Defense University (NDU), has served as the director of the NATO Undersea Research Centre (NURC), and has published over 60 papers in oceanography while at NRL and other distinguished posts. His colleague, Dr. Thomas Curtin, is currently a senior fellow at the Institute for Adaptive Systems and has served as chief knowledge officer at the Association for Unmanned Vehicle Systems International (auvsi.org), in addition to having a distinguished career in managing key ONR programs that include undersea autonomous operations and undersea surveillance. Tom also initiated an autonomous underwater vehicle festival in 1997 and has overseen the development of many of those AUV and robotics competitions, clubs, and classes currently so popular in our nation’s secondary schools.
Research Motivations
 We asked the two: Do scientists and engineers engaged in such naval research keep the thought in the back of their minds that the fruits of their research might someday reach commercial productization, and does that motivate or otherwise figure into the support and funding of such research?
We asked the two: Do scientists and engineers engaged in such naval research keep the thought in the back of their minds that the fruits of their research might someday reach commercial productization, and does that motivate or otherwise figure into the support and funding of such research?
Steve responded, “Short answer: Yes. In fact, we viewed that as sort of an ultimate goal in many instances, especially for hardware and instrumentation. Sure, you can talk about the risks involved, but that often misses the main point. ‘Revolution’ is easier to see in the rearview mirror.”
He added an analogy from terrestrial exploration: “When debating the difference between ‘evolutionary’ and ‘revolutionary’ research, a description I [encountered] was that all research is a steady progression, like climbing a ladder one step at a time—the higher you go, the more you can see. But the revolutions arise when you are able to see over a particular hill, which reveals something really new in the valley behind: the ‘aha!’ moment. These cannot be strictly anticipated; except, the existence of the hill means there might be something really cool lurking behind it.”
Tom added, “My experience in research as well as hiking is that, more often than not, what lurks behind the hill are more hills. But if you are persistent, the valley may appear out of the fog one morning. Lewis and Clark must have felt that way when they saw the Pacific.”
 The two scientists explained that the typical incubation time for advancements ranges 15 to 30 years and that the best environment for innovation and unexpected discoveries is in research departments, but only if there are “champions” supporting the research. While key drivers for naval defense research, such as World War II, the Cold War, and the space race, made it easier to find champions, it is highly likely that in the absence of such long arcs of sustained interest many initiatives might have died on the vine.
The two scientists explained that the typical incubation time for advancements ranges 15 to 30 years and that the best environment for innovation and unexpected discoveries is in research departments, but only if there are “champions” supporting the research. While key drivers for naval defense research, such as World War II, the Cold War, and the space race, made it easier to find champions, it is highly likely that in the absence of such long arcs of sustained interest many initiatives might have died on the vine.
But it is not only defense that has driven research; oil exploration and the less well-funded civilian driver of environmental research continue to motivate. Where much of the pure science of hydrography and oceanography found roots in defense, the trend is now for private interests to implement such innovation for commercial use.
In the world of naval defense, the original driver for measurement came from precision navigation and charting needs. The higher precision tools like multi-beam sonar, lidar, and oceanographic sampling are employed to derive a better picture of all elements of a “battlespace.” Some refer to a “cube” of battlespace: the airspace above, the surface, and the sea underneath. The development of systems to define these cubes has concentrated more on rapid evaluation, currency and a real-time evaluation of conditions, and what might be intruding in that battlespace at any given time. One might picture a simple combination of radar, sonar, and aerial/satellite imagery to define a battlespace, but the required supporting technologies can expand rather quickly.
For undersea evaluations, the mainstay is sound and acoustics: sonar, beamforming, multi-beam, et al. But Cold War submarine threats revealed that a lot more needed to be known about ocean conditions to be able to use these tools effectively, like water temperature patterns and other ocean properties. This has led deep scientific research into underwater and airborne sensors and sampling systems and even autonomous robot “sea gliders” to gather such data and perform other surveillance tasks.
Research for Global Navigation and Positioning
An example that might hit home for everyone would be global navigation. One obvious essential component of any these systems that seeks to observe and define the air, land, and ocean is a geospatial component. But the “what” of the gathered data is not much use without knowing the “where” of the features. It had been long theorized (for nearly a millennium) that time could be used for navigation purposes, and, with the introduction of the Harrison Clock in 1773, that solved the dilemma of determining longitude; thus a new world of navigation was opened. For enhancing global navigation purposes and to geospatially register other observed data, the NRL had been developing atomic clock technologies along with other federal agencies since the late 1940s. An early naval navigation system, TRANSIT that used the Doppler effect, was soon followed by the aptly named TIMATION system from NRL, which was later modified and implemented by the USAF as GPS.
TIMATION was “disruptive” innovation: a major leap, or new field or market, as were the first workable sonar systems. What followed was “supporting” technologies: enhancing an existing field or market by adding value. I find it amusing when a manufacturer calls the addition of a new feature on their total station or rover a disruptive innovation that will somehow change the nature of surveying as we know it; those are supporting innovations.
GPS was originally designed as a rather blunt instrument for navigation and positioning measured in tens of meters—for civilian use with the military controlling capabilities for more precision. This gap has closed dramatically, especially since the removal of selective availability (SA, a deliberate signal hobbling for civilian uses) in the year 2000. This rough precision was perfectly fine for its originally funded defense purposes.
It took a lot more science, engineering, and commercial development to refine the capabilities of GPS down to centimeters in real-time. Dual frequency GPS, multi-constellation GNNS, RTK, PPP/RTK: those are in many ways simply supportive enhancements to the disruptive innovation of global navigation satellites. While GPS does not provide positioning for underwater sensors and vessels directly, it does so through linked positioning, navigation, and guidance systems operating on or above the surface.
Underwater Remote Sensing
What comes to mind most readily when thinking about underwater remote sensing is SONAR, Sound Navigation And Ranging (a cousin to the terrestrial RADAR, Radio Navigation And Ranging). While theorized for hundreds of years, with experiments by the likes of da Vinci, the idea of bouncing sound off other objects underwater to gauge their location was not taken seriously until the speed of sound in water was first measured with a bell in Lake Geneva in 1822. It took nearly a century more for the first workable sonar system to be developed in 1906. Heightened awareness of navigation needs resulting from the Titanic disaster, plus the need to detect other vessels, spurred rapid development during WWI. We moved from simple navigation, detection, depth determination, mapping, and hazard avoidance to more precise measurement and surveying when the supporting innovations of concepts like beamforming were further developed for sonar.
Simply issuing a sharp, defined sound from a transmitter in the water omni-directionally and counting the time until it returns is rudimentary ranging. To take this concept further, an array of transmitters can each send sound at varied intervals or phases, and then, by measuring the phase and amplitude of each returned sound by another array of receivers, this can be recognizable as a “beam” from a specific direction. These are the same beamforming principles used in some types of radar, light-based systems, and other radio-navigation and positioning systems (like some terralites and pseudolites developed for ground-based and indoor positioning by such companies as Locata and Trimble XPS). There have been many overlaps, mutual benefits, and common scientific principles born by related innovations like sonar and radar.
Major advances in the fields of sonar and radar include synthetic aperture radar (SAR) or sonar (SAS), which has been enabling very high resolution with compact antennas. The price for this is a demand for much greater stability of the sensor platform (due to phase sensitivity). The coupling of the sensor and the platform (the observed and the observer, never independent) is an important general principle.
For maritime platforms, this interaction can often be challenging due to the turbulent fluid environment. Acoustics researchers may do things quite differently than sonar researchers, but aren’t they one and the same? It might seem so to the layman, but as Tom points out, “the professional acoustics community very much distinguishes acoustic propagation in a dispersive medium (like seawater), which is characterized by absorption and scattering processes, and sonar, which is the use of acoustics as a tool for probing the environment.”
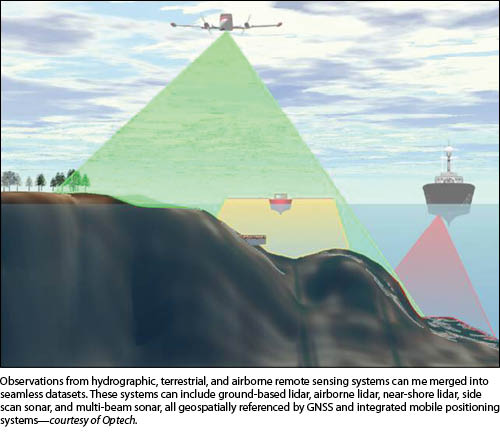
High-precision mapping tools like multi-beam sonar or the new wave of 3D multi-beam provide high definition, almost photo quality but only relative to the sensor. The next challenge is to position and orient the observations from the sensor in the mapped area of interest. To do this, an amalgam of positioning technologies is employed, linked to the surface (as GPS will not be useable below). Typically a two-antenna GNSS system, with a built-in inertial navigation device and other attitude sensors, is connected to the multi-beam sensor over the side of the survey vessel or to an array of transponders to track a robotic system underwater. Using navigation and orientation sensors combined, like some marketed by CodaOctopus and others, the heading, pitch, roll, and heave of the survey vessel is taken into account.
Both land and in-shore can be mapped by combined airborne or boat-mounted lidar (light does not work as well as sound in some ocean environments due to depth or other conditions that may degrade the beams); a similar amalgam of navigation and orientation systems is employed. Combined shore and near-shore lidar is becoming quite common, with tools like those developed by the Canadian firm Optech and others.
Another airborne sensor type with roots in the field of physical geodesy—gravimetry—is enabling higher vertical precision for terrestrial and hydrographic surveys. Airborne gravity surveys, like the Grav-D program of the National Geodetic Survey, are perfecting all-important geoid models, which is another application of a science that most people have never heard of (or would even believe).
This is not to characterize defense positioning, as in the original mission for GPS, as interested only in low precision and commercial needs as being the sole driver of high-precision developments. Tom and Steve gave another interesting example where spatial precision counts. Imagine a minesweeping operation. If the goal were to simply detonate the mines or sweep them up, then detection and location of the mines might need to be within only a meter or two. But if the goal were to be more surgical, say to have an autonomous robot seek out a mine, recognize its shape, features, and orientation, then be able to shoot a projectile precisely into the controlling mechanism of the mine to disable it, high precision would be paramount. There are even such hazards as tiny mines less than 10cm in size that can attach to ships and cause enough damage as to disable the ship. Robots have been developed to roam over the bottom of ships: a solution that has been modified for peacetime hull inspections as well.
Commercial Development Pushes Miniaturization
Tom and Steve also touched on the ongoing trend for much of the new supporting innovation to come from commercial developers. This makes a lot of sense as the tail end of Cold-War motivation has been replaced by an emphasis on things like oil exploration and environmental research. But those aren’t the only major changes; there has been a dramatic change in philosophy of instrumentation and the design of vessels that carry such instrumentation. As Tom explained, the old-school tendency was to build large, expensive, and manned instrumentation and vessels. Because designers were putting one costly egg in each huge basket, it got to the point where eventually research vessel captains were hesitant to launch such costly submersibles in all but the calmest conditions—who wants to operate the boom research technology at the risk of damaging a mega-buck submersible?
But what if instead you could launch a whole “swarm” of tiny, but nearly-as-capable units? Advances in robotics, data processing, autopilots, propulsion systems, and batteries have seen a boom in small autonomous submersibles. Some of the new wave of sea gliders can run for years, collecting oceanographic data over wide areas of ocean, popping up occasionally to send the data home and “keep on swimming.” This drama is playing out in the world of airborne UAVs as well.
From such research into high precision and robotics has come new waves of unmanned underwater robots—tethered, remotely guided, or autonomous—the field has grown steadily. If you think that airborne UAVs might have a great impact, the underwater folks are way ahead of the game. Small but incredibly versatile underwater robots are now affordable for even small surveying firms, like the little 18Kg robot built by SeaBotix.
Little bots like these are referred to as underwater inspection systems (UIS) and are used mainly for inspection. They can be dropped into a water tank for inspection or can crawl along a ship hull with cameras and robotic arms holding a snap-on set of probes and sensors. But they can also carry sonar devices for mapping in-shore, in tight places, in and around many obstacles. Between these little bots and the complete single and multi-beam systems available, a survey firm can diversify into a broader line of hydrographic surveying work. Thank science and engineering for this.
How to bring long long-term science and engineering to possible commercial development may not seem as logical an extension as some managers, funding agencies, bureaucrats, and CEO’s might be willing to grasp. Sometimes there are even disconnects between the respective disciplines. In the popular sitcom, “Big Bang Theory” a theoretical physicist taunts his experimental physics colleague, and they both look down on the engineer (who actually designs things). There is usually, though, a general understanding and respect among motivated researchers and developers in all related fields. A scientist may be motivated by discovery and, the engineer by performance, and it is the specifier or investor that who ultimately calls funding shots— – they all need each other.
It is often only in an environment of research that the most profound and unexpected discoveries happen. While the process of innovation can truly take decades, the specifiers (those holding the checkbooks in both the public and private sectors) grow increasingly short sighted. We might grumble about seemingly pointless investments or balk at the high costs of our survey equipment, but at some level our profession (and maybe our professional associations) need to recognize that these dedicated scientists, engineers, and their benefactors (both public and private) and their research and development are critical to our future.
Basic and Applied Research
Different researchers are motivated by different things, but all are valuable and in many ways interdependent. Tom explained about a well-known framework that is used to cast thinking in ONR-type investment strategies. It is commonly referred to as “Pasteur’s Quadrant” from a book by Donald Stokes of the same name (subtitled Basic Science and Technological Innovation, Brookings Inst. Press, 1997). Tom adds, “Of course, this is an over-simplification, and the quadrants in reality are defined by fuzzy lines, but the framework can be very useful.” An example showed different historical researchers, with Pasteur’s work as representing of a mix of basic and applied research.