
Here’s advice on how to understand various functions that point cloud software may need to perform, keys to look for in each, and sourcing options.
When you’re working with laser scanning, choosing point cloud software can be challenging.
Challenges
For newbies, the challenge is determining the best software to start with. Your existing CAD or other software may have point cloud capability, but does it do everything that you need it to do? Is it efficient enough? Should you add some special point cloud software to best serve your target applications/clients?
If you have scanning experience, your organization may want to pursue new applications within the markets/client base they already serve. Or they may want to pursue new market segments altogether; for example, a civil/survey firm may want to offer scanning to the burgeoning BIM market.
The challenge here is that point cloud software capabilities that are useful for one application/market are often insufficient for some of these new opportunities. That leads to looking into adding more point cloud capable software.
For each potential software addition, there are new questions. Do we need just one new software, or do we need multiple packages? How well do they fit with our current software, workflows, and IT systems?
Unfortunately, today there isn’t one point cloud software that does everything that users may want to do. Instead, there are lots of different options. The capabilities of some software overlap with capabilities of other software here and there, but many software packages tackle different aspects of the point cloud world.

Good visual quality of point clouds and associated digital imagery is an important point cloud software capability.
Point Cloud Software Functions
Rather than look at specific software packages, I feel the best way to get your arms around candidate point cloud solutions is to look at specific functions and other important, associated aspects of software.
The list of functions and aspects worth considering is too long to dive into detail here. Instead, here’s my take on the current functions and aspects that should at least be on your checklist.
Efficiency
For each function where point clouds are handled, it’s valuable to consider the efficiency of performing that function. Efficiency can be a huge factor in software selection, as it can vary dramatically from one software to another. Efficiency is particularly important for large projects and highly repetitive tasks.
Registration
From the standpoint of project accuracy, if you don’t get registration right, you’re in trouble. Laser scanner manufacturers offer their own registration software, as manufacturers’ recommended registration processes are often tied to their scanner’s specific capabilities. Registration is increasingly being done “on the instrument,” but there’s typically still room to tighten up registration in the office.
Even more important than tightening things up is the ability to address registration problems. These can result from incomplete scan data, from a target being inadvertently moved, from a target being incorrectly located by a total station, etc.
Fixing such problems is akin to fixing “problem satellites” for GNSS-based network closures. There are many different methods for performing registration, including target-based, cloud-to-cloud, traverse-based, geometry match, visual- and image-aided matching, ties-to-control, and, SLAM-based.
The more registration methods and the more “fixing” tools available within a software package, the better. Proper support of survey control, coordinate systems, and sound “absolute value” reports of registration results can also be very important.
Another registration option is having it done in the cloud by a third party, sometimes a scanner vendor. While this is convenient, many surveyors prefer to work with raw instrument data for registration. This can provide greater mathematical confidence in the actual registration accuracy.
Loading/import
Point cloud (and image) files can be huge, and loading them into software can be problematic. Software capabilities today can vary significantly for this first, key step. Import starts with data format; make sure your software can accept the required formats.
If not, then source format conversion software. Consider advanced import options such as partial importing, importing/not importing “normals,” auto-finding of targets upon import, and the ability to import survey data or control data from the scanner.
Format conversion
Some point cloud data formats are better for certain applications. For example, some formats are better for making fly-throughs/movies. Others better support streaming and storage/file size challenges, and yet others are better for modeling/feature extraction.
Project organization
Look for approaches that are easy to use yet also comprehensive, as some projects can be large and complex.
Data organization and visualization
Within a single project, it’s helpful to have dedicated areas for specific types of tasks, for example, dedicated modeling areas, dedicated areas for clipping and cloud segmentation, and even for duplication.
Display/rendering/viewing
This is one of the most important functions of any point cloud capable software. There are three keys aspects. One is responsiveness of the displayed/rendered image to viewing, especially freehand 3D viewing. A second key aspect is visual quality: Is it easily understandable and informative? A third key aspect is the number of available viewing options: the more, the better. Options can include zoom/pan, 3D, false color, true color/texture mapping/image overlay, black and white, plan, elevation, silhouette, background images, 360º panoramic views, and more. New options are constantly being added.
Digital images
Digital imagery is increasingly being used with point clouds to add realism. A software’s ability to manage image data, apply image overlays, support HDR, and other image editing approaches is likewise increasingly important.
Point cloud editing
Editing is often an important task for point cloud projects. Functions include cleaning/scan noise removal, clipping, boxing, partitioning, segmenting, and decimation. Look for tools that are versatile and easy to use.
Measuring
Tools should include pt.-to-pt., pt.-to-surface, delta x, delta y, delta z, and units of measure. Notation. Can comments/comment boxes/leaders be added into the viewing space and retained as a view is changed? Are the commenting tools easy to use?
Modeling
Modeling is the process of converting point clouds into objects, lines, surfaces, meshes, etc. This is a focus for many point cloud capable software packages. In addition to generic tools like creating slices for sections/profiles, processing point clouds into planes, target extraction, etc., many software packages address specific markets/applications. The more market-specific tools, the better. Point cloud capabilities for specific applications/markets include:
Civil/survey: Applying standard feature coding to scan points for topographic surveys is a well-accepted practice. In addition, tools should enable calculations of areas and volumes and should enable creating ground surfaces, cross-sections and profiles, and TINs/meshes. Clearance tools are also valuable (e.g., bridge-to-road clearances) here.
Industrial plant/mechanical systems: Tools can model point clouds into piping and steel shapes, identify flanges, and assist in locating tie points. Modeling can be done by fitting to simple geometry or via matching with catalogs. Object libraries are also useful for repetitive modeling.
Buildings/BIM: Look for tools that enable modeling to building-specific objects, such as floors, ceilings, windows, and doors and that help create plans/floor plans, elevations, reflected ceilings plans, and building information models (BIM). Volume and area calculation tools are also helpful.
Construction QA: Tools for modeling point clouds into surfaces for timely floor flatness analysis have proven useful here.
Forensics: Some point cloud software supports bullet trajectory analysis, NIST-compliant measurement QA, and blood spatter analysis.
Asset/facility management: The most important capability here is the ability to link spaces within a point cloud to specific assets and their related information.
Meshing
Within the point cloud world, meshing is an important enough modeling function that I’ve broken it out separately. Creating good meshes is important for applications like tunnels, overhangs, and ground surfaces, and for modeling objects/statues where a “watertight” mesh is needed. It’s not uncommon for organizations to source specialty point cloud meshing software.
CAD interface
Point clouds and CAD models are often combined within software for revamp design projects, clash/interference analysis, marketing proposals, construction QA, etc. It’s important that CAD applications can import point clouds and objects modeled in point cloud software and that point cloud applications can import CAD models. The key is avoiding loss of content at import/export.
Clashing/interference checking
Laser scanning is commonly used to aid in clash detection/interference checking. Clash detection can be done in some point cloud packages or in third-party packages (e.g., 3D plant design software). Clashing can be point clouds against point clouds, point clouds against CAD models, point-cloud derived surfaces against other point cloud derived surfaces, or CAD models against CAD models.
Clashing can be done for static situations, e.g., designing pipe routing through an existing plant, or for dynamic situations, e.g., path planning for equipment removal in a dense industrial facility. Keys for this capability include an ability to accurately identify clashes, allow informative visualization and notation of each clash, adjust clash check clearances, and generate proper reports.
Design aid
Some users prefer to do preliminary revamp design within point cloud software because of its efficiency in handling/viewing point clouds. As such, simple design tools for creating basic geometric objects—planes, boxes, cylinders, etc.—are helpful. These can also be useful for geometry matching registration approaches.
Creating 360º panoramic point cloud images for web sharing
These have proven to be enormously popular. Like Google’s Street View app, they put the user’s viewpoint where a scanner was, and then allow the user to view the surrounding scanned area, pan/zoom, measure, and annotate the view.
Users can also bring in CAD objects for design checks and proposals and even hyperlink to asset information for elements within the scene. Web sharing can be local or via an external portal. These relatively lightweight (compared to point clouds) files can be used with phones and tablets. Web browser versatility is a big plus here.
Creating movies/fly-throughs
Some point cloud software has this valuable capability, but higher-end fly-throughs/movies are often generated in more advanced movie making software.
Creating orthophotos
This friendly deliverable has proven useful in architectural and related applications.
Scripting/APIs
Some users have applications which are not fully served by available point cloud software and are willing to code add-ons themselves. For such users, software packages (and vendors) that support this are valuable.
Sourcing
Price and annual maintenance/support/subscription costs are always a factor. Since organizations can wind up with multiple point cloud capable software packages, costs can add up.
There are numerous options related to sourcing point cloud capable software. One useful option is plug-ins, which are relatively inexpensive compared to full blown software packages. With plug-ins, users work within a familiar interface and can also benefit from better point cloud handling and additional features that CAD software, for example, may not have.
Today users also have freeware options, especially free point cloud viewers. Souring options for commercial point cloud software include purchase, lease, rental, and subscription-based licensing. There are also node-locked or floating license options. Licensing can be a pain, so do your homework. And, as noted above, some vendors also offer software-as-a-service (SaaS), especially for point cloud registration.
IT and General Considerations
Point cloud software, like any software, should also be assessed in terms of user interface: its ease of learning and ease of use. There’s often a trade-off between simple ease-of-use and richness of functionality.
Expect your IT group/specialist to be involved in your software engagement. A couple of issues usually need to be addressed. The first is data storage/file sizes. Laser scanning and point clouds are “big data.” Users are trending to use laser scanning on increasingly large projects with faster scanners that produce more dense scans. For large projects, we’re talking 1,000s of scans, billions of pts., and 100s of GB of data. This puts pressure not only on storage and data sharing, but also on viewing and handle point clouds via streaming to phones and tablets. Computing hardware may also need to be upgraded.
Sharing point cloud data is also increasingly valuable. Solutions are available for enterprise and for single users via servers and cloud sharing. Data/project security is always a consideration, so do your homework there as well.
Finally, as with any software, aspects like technical support, training, software stability, a vendor’s openness to adding new features, and a vendor’s responsiveness to bug fixes should also be assessed.
For insights into specific point cloud software packages, I usually steer people to talk with other users and to browse a popular public, online laser scanning support forum where users openly discuss pros/cons of specific software and vendors.
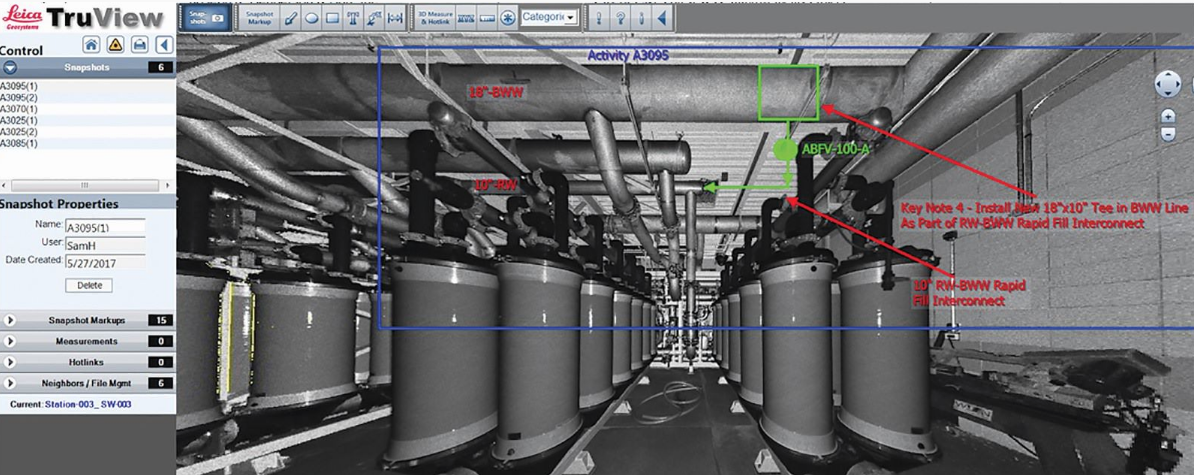
The ability to measure and annotate panoramic 360-degree scan images and share them over the web has proven to be a widely valuable point cloud software capability. Credit: J J Henderson Construction Inc.